1.前言
树木作为生态系统的重要组成部分及重要的生产者,在生态圈承担着不可或缺的作用。随着测绘技术的进步与发展,我国数字化林业建设进程的不断向前推进。三维激光扫描作为一种可以快速获取目标的三维空间坐标,并以点云的形式展现出物体表面真实结构的新型测绘技术,已经广泛应用林业资源调查、林分结构研究以及单木三维重建等方面。通过三维激光扫描获取的点云数据对树木进行三维重建,可以实现对树木形态、树木胸径、树冠表面积、体积等参数的准确获取。为树木生长趋势、森林资源调查、生态系统碳循环、名木古树保护等研究提供了可信的基础数据。
目前,获取树木的三维激光点云数据主要采用地面式三维激光扫描仪与机载激光雷达系统。对于单株树木的扫描工作,通常采用地面式三维激光扫描设备;对于大面积的树木林地,使用机载激光雷达系统能够更加快速、全面的获取树木的点云数据。然而,地面式三维激光扫描系统的架站受限于地形等因素,难以在坡度较大的山区林地开展工作;且单站扫描不能完全获取树木的全部点云,一般需两站及以上的扫描站点才能完全观测到树木的整体情况,大大降低了数据采集的效率。机载激光雷达受激光入射角度的影响,对树干部位的点云数据获取能力有限;虽然目前主流的机载激光雷达头均有多次回波的功能,但对于生长较为茂盛、树冠面积较大的树木林地,激光穿透树冠的能力有限,经多次回波后也依然无法穿透树冠到达地表,导致树干部位的数据缺失,进而影响树木整体形态的构建及树木胸径测量的精准程度。综上所述,从作业的安全性、数据采集效率、数据采集的完整性等角度出发,地面式激光扫描仪与机载激光雷达系统虽有各自的优势,但在某些方面仍存在不同程度的限制。
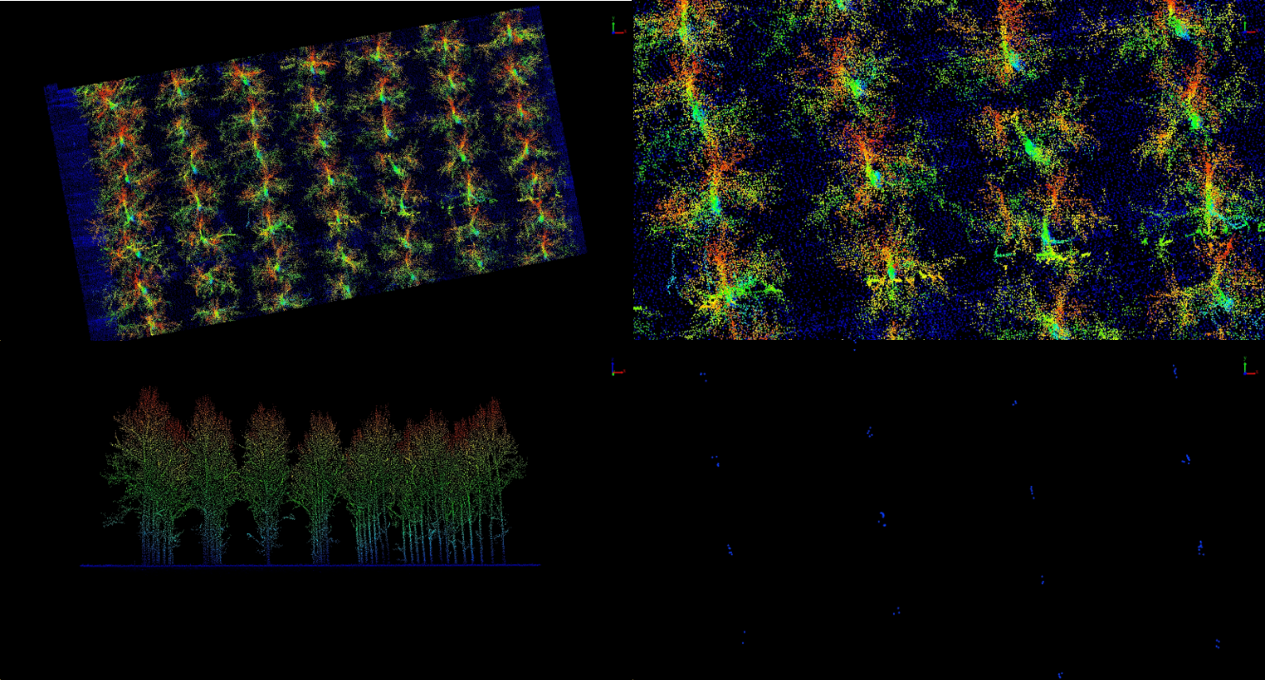
Rigel Mini VUX-1 UAV机载雷达获取的林地数据
树干部分只有几十个点,难以精确拟合成圆测量树木的胸径
手持式的SLAM移动扫描系统,采用了突破性的同步定位建图技术,能够在运动过程中获取高精度的激光点云数据。在林地调查工作中,使用SLAM设备穿梭于欲调查树林,即可在保证测量人员作业安全的同时,高效、完整地获取树木的详细的激光点云数据。通过后处理软件完成树木形态的构建,计算出树木的胸径、树冠面积、体积等要素信息。SLAM设备省去了地面激光扫面设备繁琐的搬运换点架站,又能获取到机载雷达系统难以采集到的树干信息,从根本上提高了作业效率,满足了林地调查中获取树木三维激光点云数据的要求。
2.SLAM技术简介
SLAM基本原理
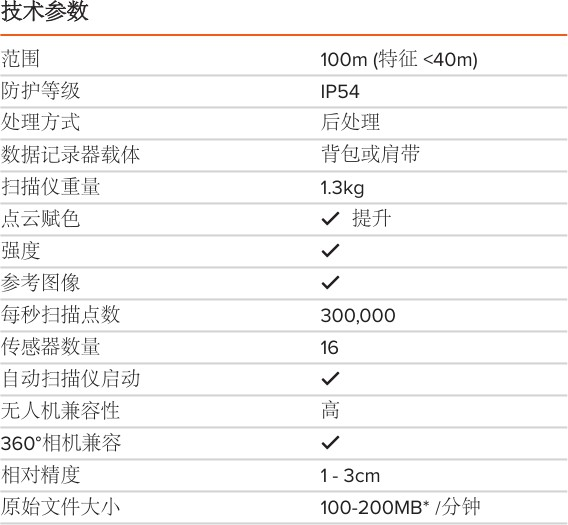
SLAM (Simultaneous localization and mapping),意为“实时定位与地图构建”。SLAM可以理解为: 扫描仪在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现扫描仪的自主定位和导航。

 SLAM技术原理
SLAM技术原理
3D SLAM
3D SLAM 技术是激光扫描仪的运动轨迹是一条与工作人员行走的步态有关的非线性和高动态的曲线。按照一般的理解,激光扫描仪如果安装在移动测量系统中,一定要有一个高精度的定位系统(POS 系统)与之匹配。这样,激光扫描仪得到的激光点才能得到对应的位置和姿态数据,进而合成三维的激光点云。为了能解算出激光点云数据的高动态非线性位姿,通过研究激光点云的处理算法,可从这些杂乱无章的点云中找到线索,求取其中隐含的更稳定的高阶特征点和特征向量,并连续跟踪这些特征点和特征向量,进而高精度地动态反向解算扫描仪的位置和姿态。这种高精度的动态反向解算位置和姿态的方法颠覆了传统的测绘方法,为测绘技术开拓了一种新的思路方法。
3.SLAM技术特点
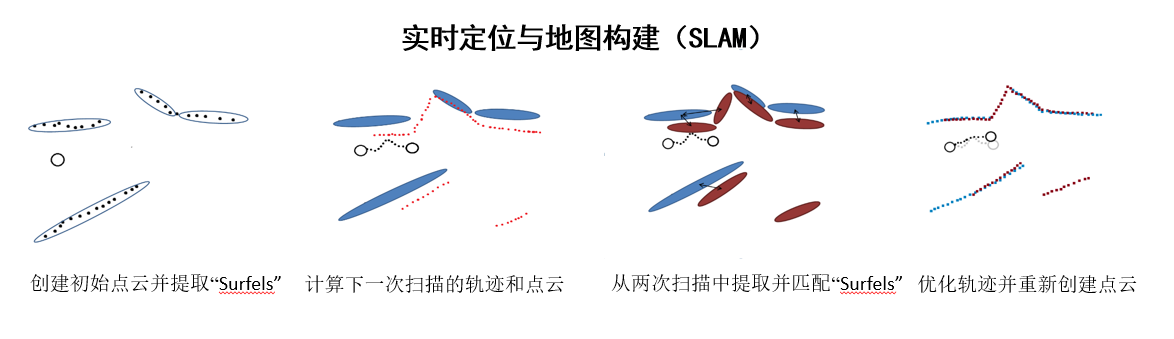
目前,现有的地面移动测量系统通常是基于车载的移动测量系统的,但目前地面移动测量系统均需要依赖于全球卫星导航系统(GNSS)和惯性导航系统,只能用于室外环境。然而, 由于室内和地下空间等环境中没有 GNSS 信号,因此,传统的移动测量系统无法正常工作。固定式激光扫描可以用于室内室外的环境,但是复杂场景需要大量换站,然后进行点云拼接, 数据获取的效率十分低下。然而,即时定位与地图构建(SLAM)技术在移动测绘方面具有较好的应用,不依托 GNSS 信号,能够对室内和室外的地面水平环境进行地图构建和环境建模。因此,SLAM 技术在测绘领域中的应用降低了测量复杂性,不需要大量标记地物点,不需要GPS 信号,适用于在室内室外场景,对于解决传统测绘中的定位及场景重建问题具有广阔的前景。
由于 SLAM 技术无需 GNSS 信号,对工作环境又有极强的适应性,基于 SLAM 技术的移动测量系统在多个测绘领域发挥作用,具体表现为:
(1)外业数据采集速度极快,可快速获得所需点云数据,数据精度高。
(2)内业点云预处理时间短,自动化程度高,基本不需要人工干预,短时间便能获得配准好的点云数据。
(3)操作简单方便,无需换站,连续采集,具有连贯性,可实现室内外一体化扫描作业。
(4) SLAM 技术的测绘移动测量扫描仪在任意环境中长时间工作故障率低,对于精度要求较高的重点区域,可与固定测站式三维激光系统配合使用,既能保证精度,又能保证效率。
无论是室外或者室内扫描环境,只要扫描环境结构特征越明显
4.GeoSLAM ZEB HORIZON
GeoSLAM ZEB Horizon手持式移动三维激光扫描仪是由澳大利亚国家科学研究机构 CSRO 和英国三维激光雷达采矿行业解决方案提供者 3D lasermapping 公司以合资企业的形式成立,并联合研发出的目前最轻便的SLAM 扫描系统。

GeoSLAM ZEB Horizon 3D 系统
 一个背包搞定所有主配件
一个背包搞定所有主配件
GeoSLAM Horizon 3D 系统技术参数
数据预处理软件 GeoSLAM HUB 特性:
•在‘GeoSLAM Draw’中将 3D 数据转换为 2D 矢量数据
产品特性:
•全套设备仅 3.5kg,可移动的快速扫描多区域环境
•扫描头自动旋转,使动态扫描更加便捷,可进行 360°全景扫描
•结构设计小巧,可进入低矮及狭小空间进行全方位数据采集
•支持手持、固定杆、背负、车载、船载、无人机载等多种方式扫描




5. GeoSLAM ZEB Horizon在林业调查的应用方案
外业数据采集
激光头重 1.3Kg,单块电池可连续扫描 4 小时,可进入无 GPS 信号的狭小空间采集数据。扫描开始前,应事先规划好扫描路线,林地树木扫描采取穿梭环绕方式,在不重复行走的前提下,确保测区内每棵树的两侧均有行进,以保证树木点云数据的完整性。
数据内业处理
将原始数据导入进预处理软件 Hub 里进行解算,解算数据所需时间和电脑的配置以及扫描所用时间相关,一般来说解算时间约为扫描时间的 1-3 倍。
在预处理软件 Hub 中查看点云数据的整体 3D 效果,也可以以 2D 效果图来进行显示。当同步影像与点云相匹配之后,点云数据还能够以 RGB 真彩色来显示,与最终成果图对比起来会显得更加的直观有效。
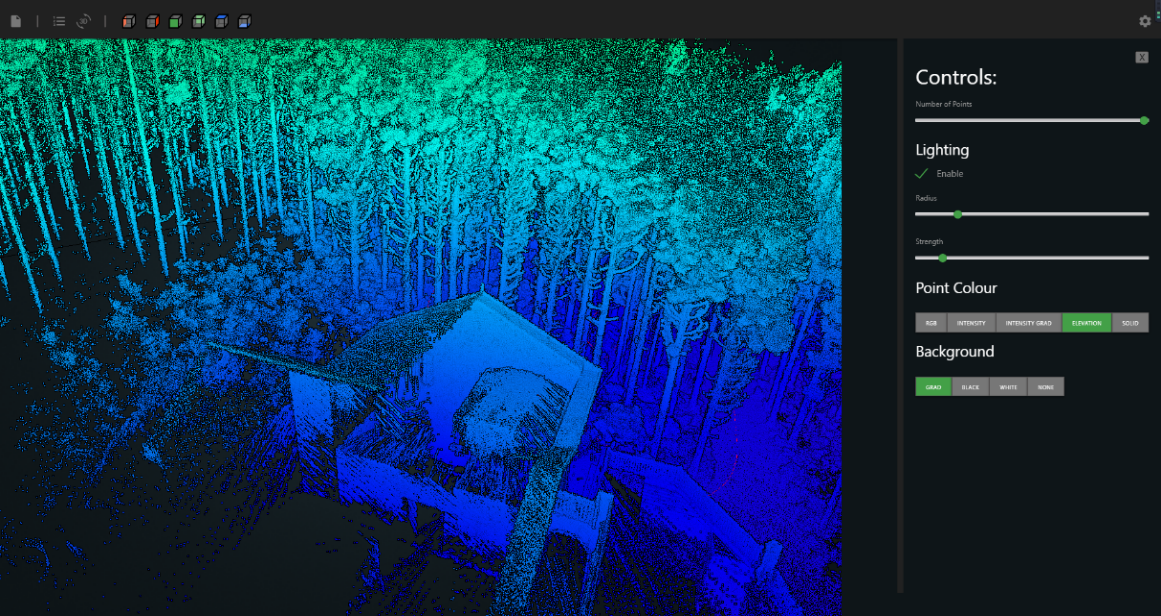
 行进轨迹以红色线表示
行进轨迹以红色线表示
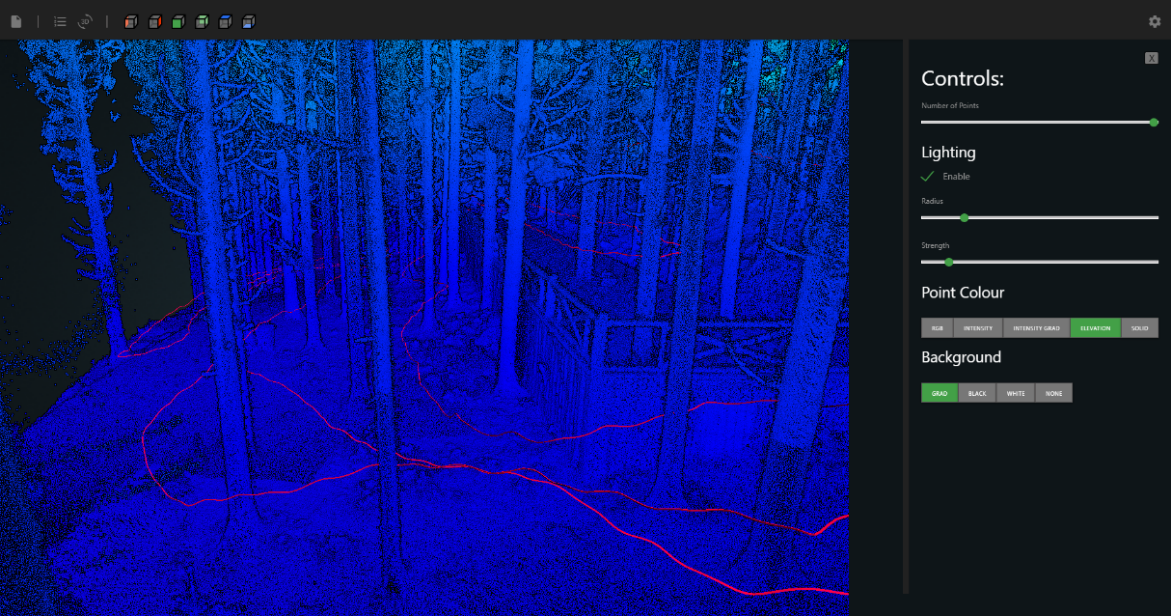
 使用裁剪盒工具切剖检查树干数据的完整度
使用裁剪盒工具切剖检查树干数据的完整度
使用后处理软件LiDAR360对树木的胸径与树冠面积进行计算,胸径(DBH)是胸高直径的简称,指树干距地面以上相当于一般成年人胸高部位的直径。在我国和大多数国家,胸径定义为地面以上1.3米高处树的直径。将林地数据进行归一化后,进行单木分割,以不同颜色显示每一棵树,并在每棵树距地1.3m处进行切剖,获得计算胸径所需要的点云数据,拟合为圆,即可得到树木胸径信息。
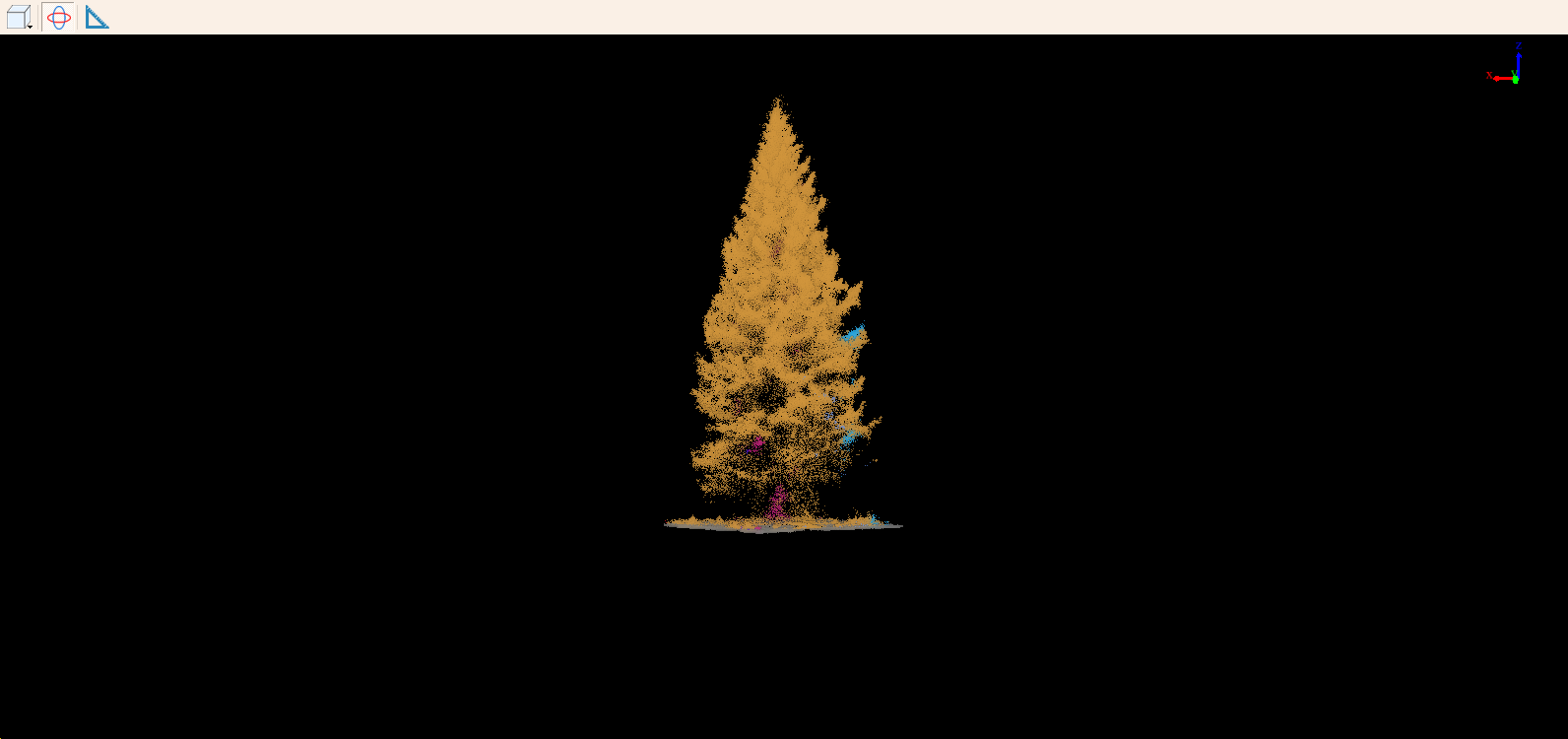
单木分割结果(以树ID显示)
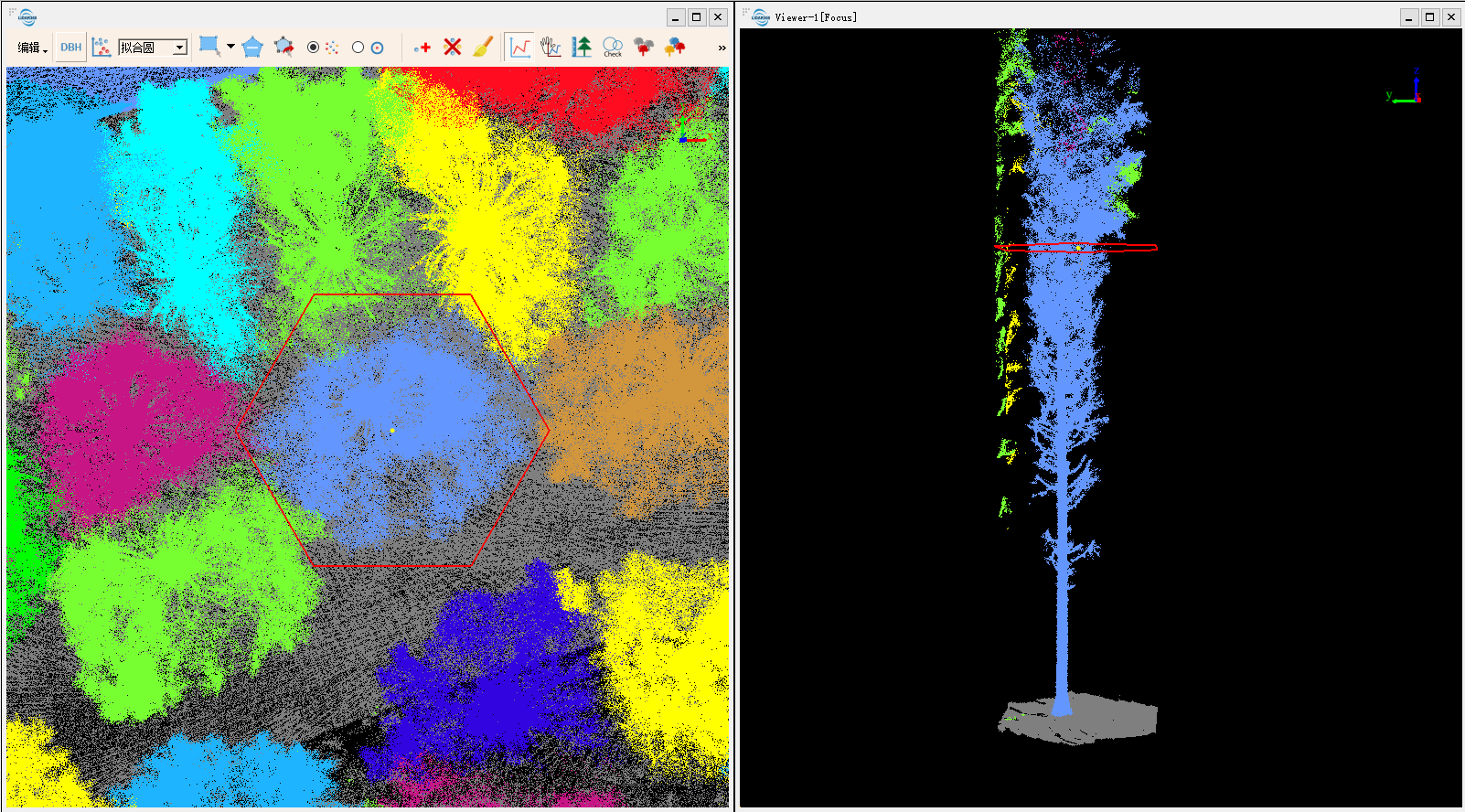
 提取胸径点云数据
提取胸径点云数据
 拟合胸径点云为圆并计算胸径
拟合胸径点云为圆并计算胸径
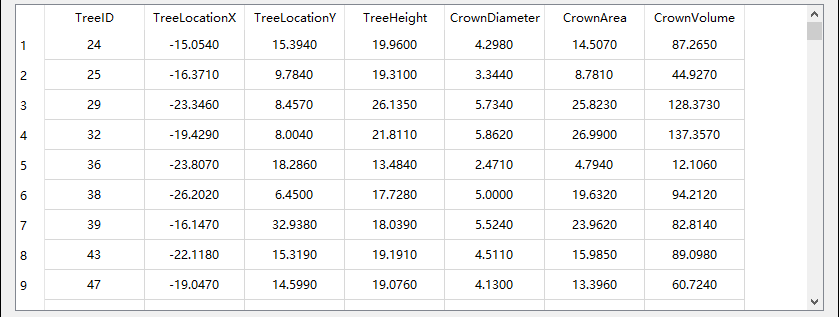 树高,树冠面积,树冠体积计算结果
树高,树冠面积,树冠体积计算结果
树冠体积对生物量的研究有着重要意义,目前常用的冠幅计算方法是体元模拟法,是将树冠分割成无数个边长为k*k*k的小立方体,每个小立方体即为体元,计算有效体元个数,对小立方体体积求和,便可以获得树冠体积,具体的流程如下:
(1)将树冠从冠底到冠顶沿z轴方向进行等距分割,分割步长记为k;
(2)从分割面将树冠点云数据投影至平面,沿着 XY 轴将树冠投影面以 k为步长进行等距分割。判断分割的小方格中是否包含投影点云,只将包含有点云的小方格进行计数,以T代表方格数目,因此,此部分树冠投影面积S为:

体元模拟法计算树冠体积的结果更为精确,并且不需要考虑树冠形状与树木个体差异,使用GeoSLAM手持式激光扫描仪获取的树木点云数据,树冠部分数据的完整程度要优于地面激光扫描系统,因此在体积计算的过程中,误差较小。
6. 机载GeoSLAM ZEB Horizon在林业调查的应用方案
外业数据采集
GeoSLAM ZEB Horizon可悬挂在大疆M300、M600上作为小型机载LiDAR使用,续航时间约20分钟,单次飞行可获取不少于0.5平方公里的点云数据。采集数据前,应事先规划好飞行航线,确保测区数据采集完整。


内业数据处理
1.原始数据解算
使用GeoSLAM HUB软件对采集的原始数据进行解算,本次采集数据14分钟,得到三维点云91060000个,解算后的数据如下图所示

2.单木分割
将点云数据加载进LiDAR360软件后,进行地面点分类并将点云进行归一化,然后进行单木分割处理。

 单株林木提取
单株林木提取
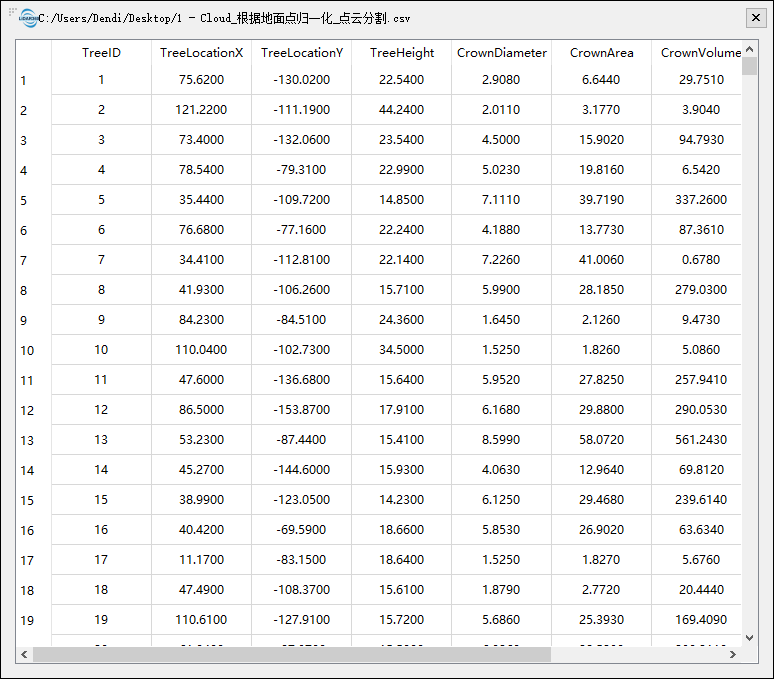 树高,树冠直径,树冠面积,树冠体积计算结果
树高,树冠直径,树冠面积,树冠体积计算结果
7.总结
随着三维激光扫描技术的普及与发展,人们已经感受到它与传统测量仪器之间的天差地别。利用三维激光扫描设备获取的点云数据可以实现林地树木的三维结构重建,获得精确的树高、胸径、树冠面积及体积等数据,为林地资源调查等项目提供了宝贵的资料。这种作业方式不仅节约了时间,提高了作业效率,也大大减少了人力、物力的投入。GeoSLAM ZEB Horizon移动式扫描仪作业方式灵活,单人即可完成扫描作业,能够快速完整地获取林地树木的三维激光点云数据。
本次测试将ZEB Horizon设备挂载至大疆M300飞机上,获取了树冠发育茂盛、林木生长密集的森林林木数据。数据采集时间14分钟,数据解算时间35分钟,使用LiDAR360软件对森林所有的林木进行单木分割,统计得到树木2545棵,并提取出树高、树冠面积及体积等林木结构参数,用时45分钟。对比人工手段使用皮尺等工具测量林木结构参数,使用Geoslam设备(非接触式测量)在不伤害树木的情况下大大提升了作业效率,并且能够采集人们难以到达处的林木数据。其具体优势如下:
1.体积小、质量轻、无需GPS信号,所见即所得,可手持进入茂密的林地扫描
2.多种搭载方式,可搭载至大疆M300、M600等无人机作为机载雷达使用
3.激光不受环境光线影响,黑暗环境也可采集精确的点云数据
5.先进、专业的林木参数分析软件,提取的林木结构参数结果精确、可靠。结果内容丰富,可单独导出每棵数目的点云,也可导出参数表格,方便存档、查看、分析。