GeoSLAM移动式三维激光扫描技术是一种先进的全自动高精度的立体扫描技术。三维激光扫描技术又被称为实景复制技术,它突破了传统的单点测量方法,具有高效率、高精度的独特优势。三维激光扫描能够提供扫描物体表面的三维点云数据,实现实体真实、完整和精确的三维复制。
传统的土方测量方法
一是以单点采集,即通过采集离散点的三维数据实现地形图的绘制工作,主要方法仪器有全站仪、GPS、经纬仪等,该类测绘方法在测绘过程中所需时间长,且地形复杂区域存在采点困难、效率低等弊端;二是以面采集,如摄影测量技术等,即通过航拍影像获得大批量三维坐标,虽采点效率高,但是影像处理到模型搭建耗费时间较长。
GeoSLAM三维激光扫描土方测量
作为一种新型测绘技术,SLAM移动式三维激光扫描技术具有采集速度快、密度大、精度高、非接触和测量范围广等优点。通过对我们之前做过的相关案例分析显示,该技术满足土方量测算精度要求,并且相对于传统方法,简化了作业流程,提高了作业效率,从而为土方量算提供了高效全新的技术手段。
一、SLAM简介
1.1. SLAM原理
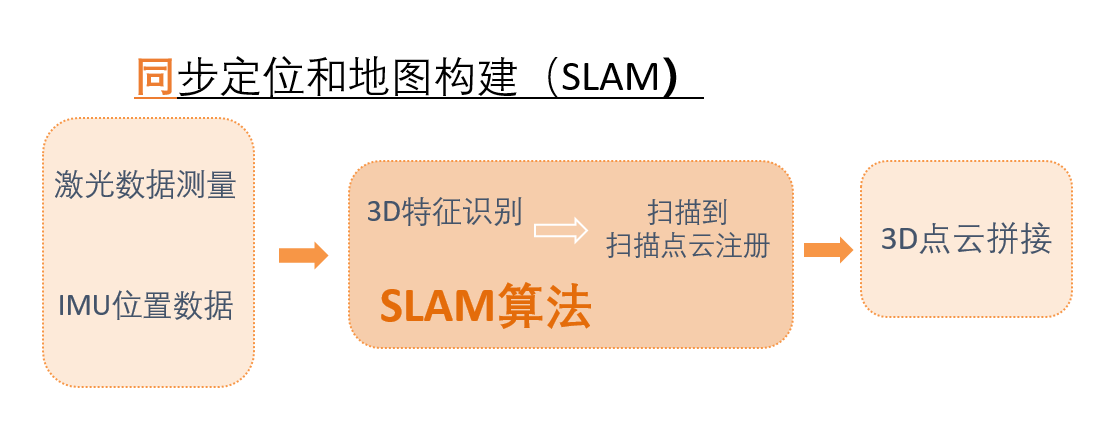
SLAM是Simultaneous localization and mapping缩写,意为“同步定位与建图”。SLAM问题可以描述为: 扫描仪在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现扫描仪的自主定位和导航。
1.2. 3D SLAM
3D SLAM技术是激光扫描仪的运动轨迹是一条与工作人员行走的步态有关的非线性和高动态的曲线。按照一般的理解,激光扫描仪如果安装在移动测量系统中,一定要有一个高精度的定位系统(POS系统)与之匹配,这样,激光扫描仪得到的激光点才能得到对应的位置和姿态数据,进而合成三维的激光点云。为了能解算出激光点云数据的高动态非线性位姿,通过研究激光点云的处理算法,可从这些杂乱无章的点云中找到线索,求取其中隐含的更稳定的高阶特征点和特征向量,并连续跟踪这些特征点和特征向量,进而高精度地动态反向解算扫描仪的位置和姿态。这种高精度的动态反向解算位置和姿态的方法颠覆的传统的测绘方法,为测绘技术开拓了一种新的思路方法。
二、SLAM技术特点
目前,现有的地面移动测量系统通常是基于车载的移动测量系统的,但目前地面移动测量系统均需要依赖于全球卫星导航系统(GNSS)和惯性导航系统,只能用于室外环境。然而,由于室内和地下空间等环境中没有GNSS信号,因此,传统的移动测量系统无法正常工作。固定式激光扫描可以用于室内室外的环境,但是复杂场景需要大量换站,然后进行点云拼接,数据获取的效率十分低下。然而,即时定位与地图构建(SLAM)技术在移动测绘方面具有较好的应用,不依托GNSS信号,能够对室内和室外的地面水平环境进行地图构建和环境建模。因此,SLAM技术在测绘领域中的应用降低了测量复杂性,不需要大量标记地物点,不需要GPS信号,适用于在室内室外场景,对于解决传统测绘中的定位及场景重建问题具有广阔的前景。
由于SLAM技术无需GNSS信号,对工作环境又有极强的适应性,基于SLAM技术的移动测量系统在多个测绘领域发挥作用,具体表现为:
(1) 外业数据采集速度极快,可快速获得所需点云数据,数据精度高。
(2) 内业点云预处理时间短,自动化程度高,基本不需要人工干预,短时间便能获得配准好的点云数据。
(3) 操作简单方便,无需换站,连续采集,具有连贯性,可实现室内外一体化扫描作业。
(4) SLAM技术的测绘移动测量扫描仪在任意环境中长时间工作故障率低,对于精度要求较高的重点区域,可与固定测站式三维激光系统配合使用,既能保证精度,又能保证效率。
三、GeoSLAM HORIZON 特性
GeoSLAM Horizon 手持式移动三维激光扫描仪是由澳大利亚国家科学研究机构CSRO和英国三维激光雷达采矿行业解决方案提供者3D lasermapping公司以合资企业的形式成立,并联合研发出的目前最轻便的SLAM扫描系统。

GeoSLAM Horizon 3D系统

多平台搭载移动扫描功能:

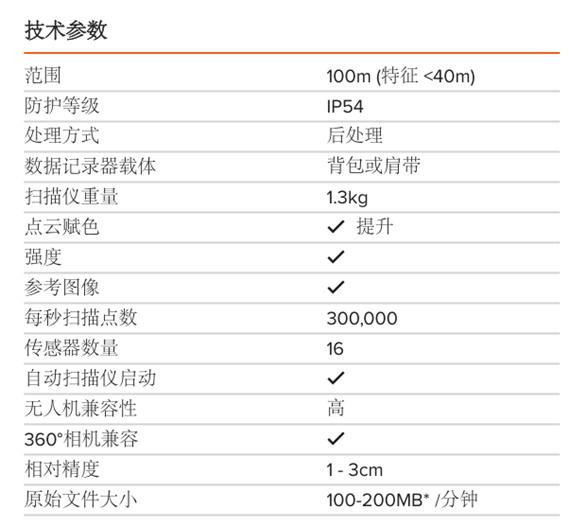
GeoSLAM Horizon 3D系统技术参数
四、GeoSLAM Horizon土方量测算应用方案
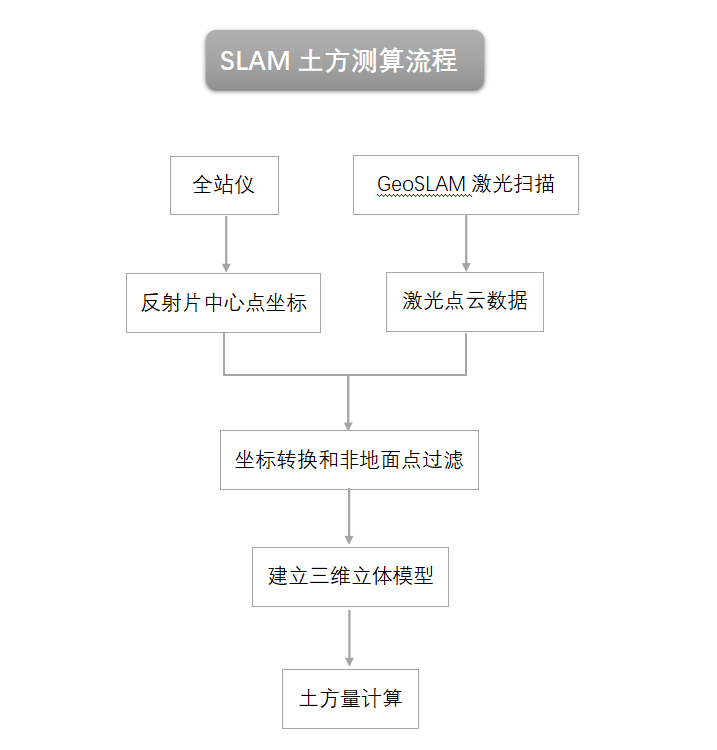
4.1. SLAM技术土方测算流程
4.1.1. 外业数据采集
现场准备:

静止开机30秒即可进入移动数据采集
现场扫描:
手持断激光头仅有1.3Kg,单块电池可连续扫描4小时。

4.1.2.数据内业处理
(1)数据解算阶段
将原始数据导入进预处理软件hub里进行解算,解算数据所需时间和电脑的配置以及扫描所用时间相关,一般来说解算时间约为扫描时间的1-2倍。
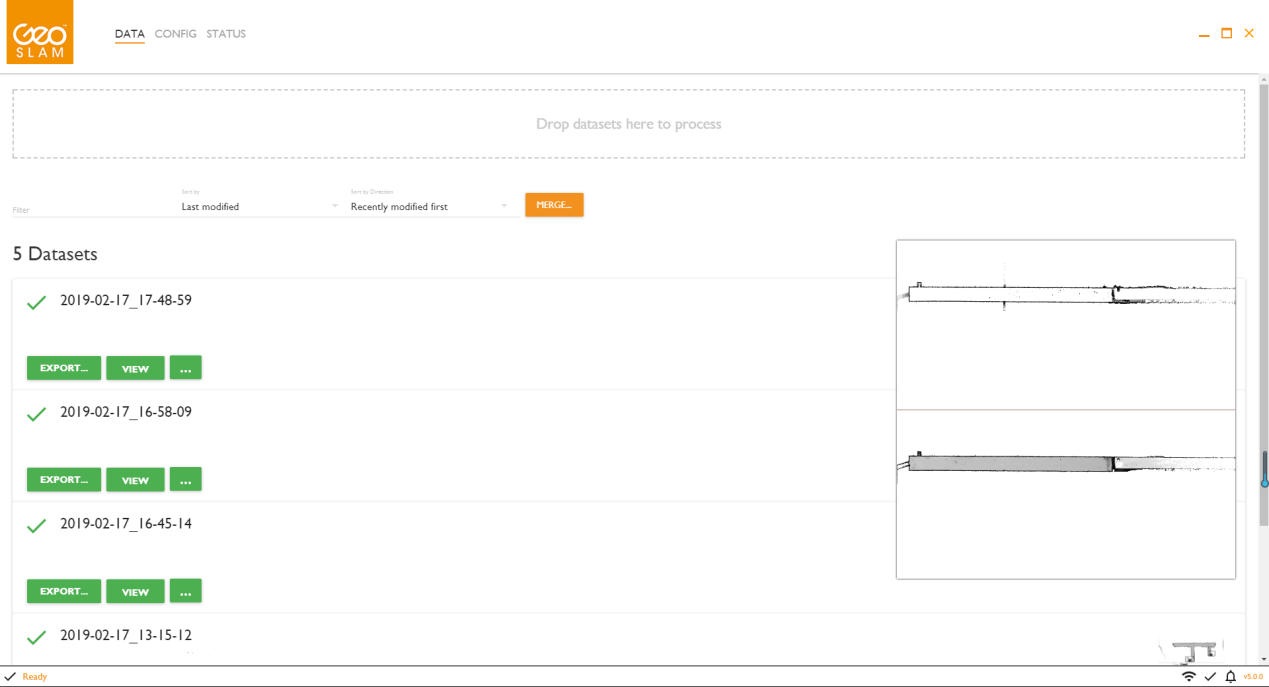
原始数据直接拖入解算软件,自动解算
可在预处理软件hub中查看点云数据的整体3D效果,也可以2D效果图来进行显示。当同步影像与点云相匹配之后,点云数据还能够以RGB真彩色来显示,与最终成果图对比起来会显得更加的直观有效。
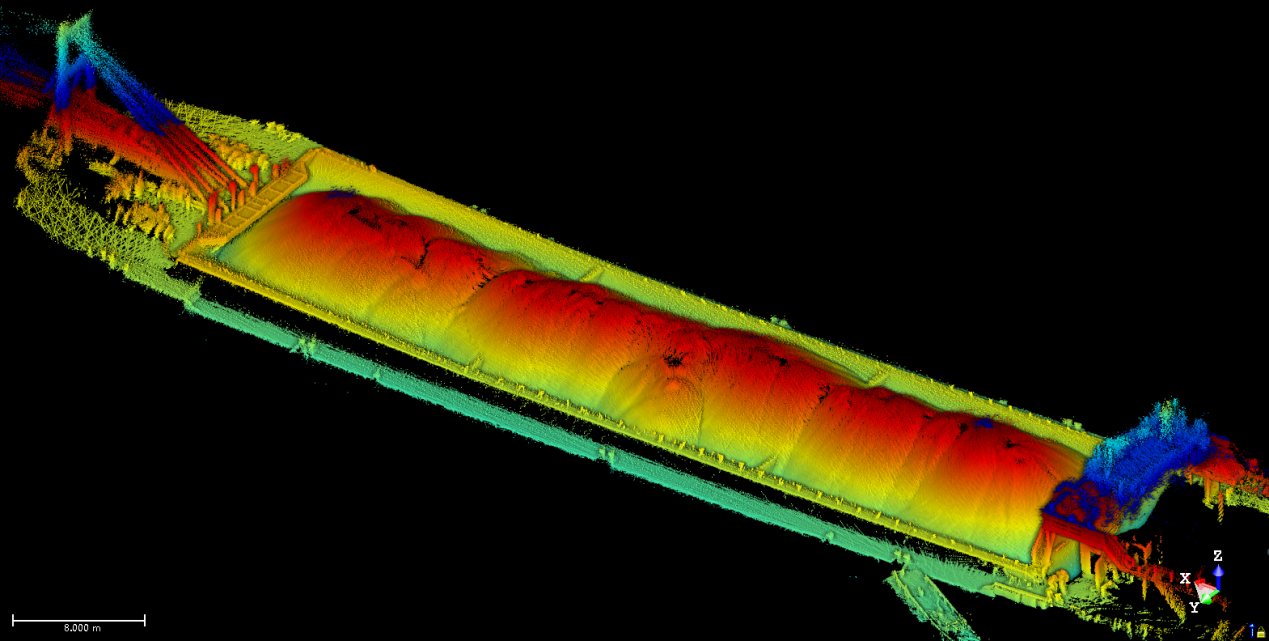
两分钟采集的货运沙船点云数据
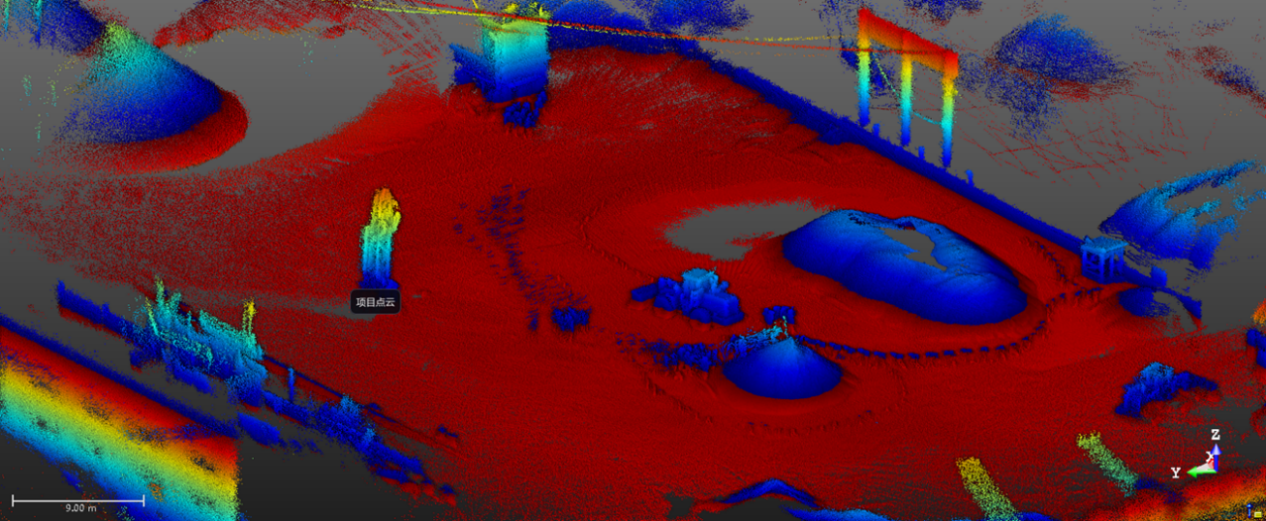
两分钟采集的露天沙场点云数据
(2)数据后处理阶段
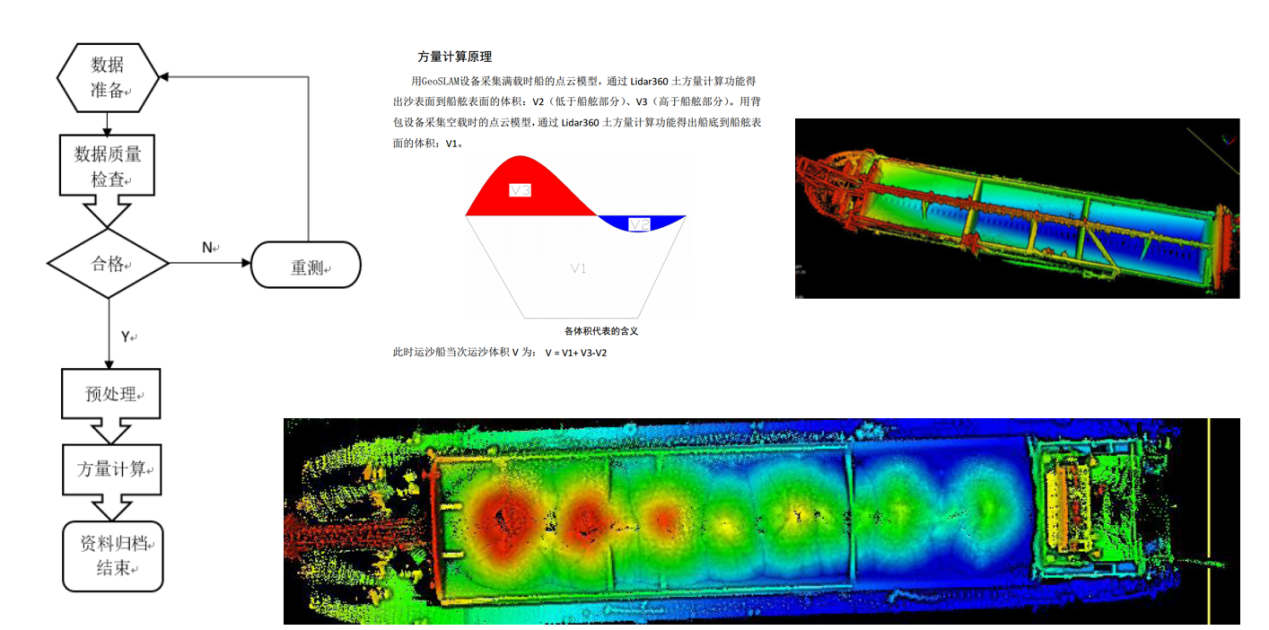
15分钟内货运沙船方量测算
15分钟内露天沙场指定堆体方量计算
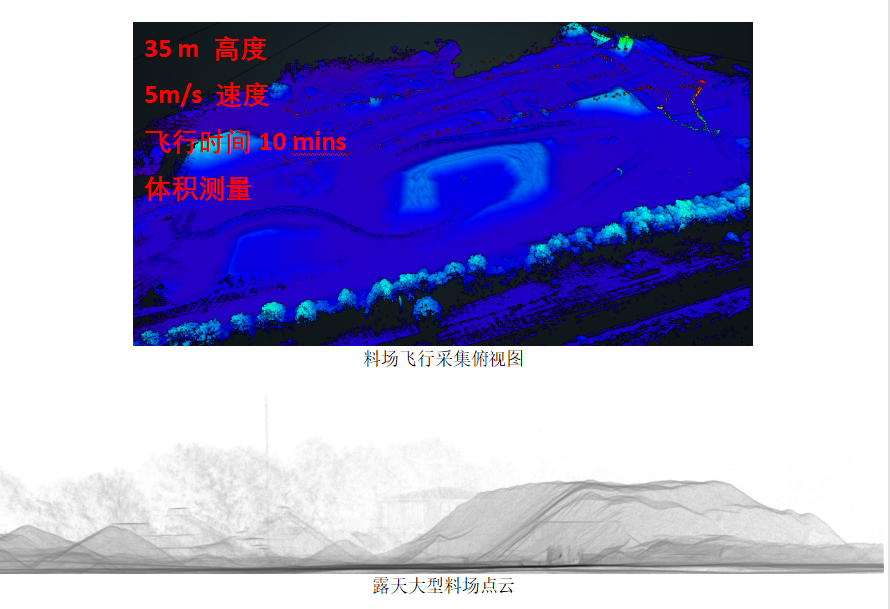
五、GeoSLAM Horizon室外土方量测算无人机搭载应用
大疆M600 Pro可轻松挂在GeoSLAM整机系统进行航飞扫描,相对航高可到30-70m,航速不小于5m/s,续航时间不小于10分钟。

GeoSLAM Horizon大疆M600 Pro无人机搭载
六、GeoSLAM Horizon室内土方量测算应用
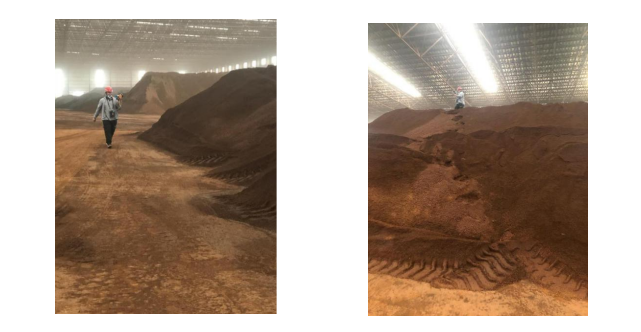

此次室内堆体扫描耗时8分11秒,数据解算20分钟
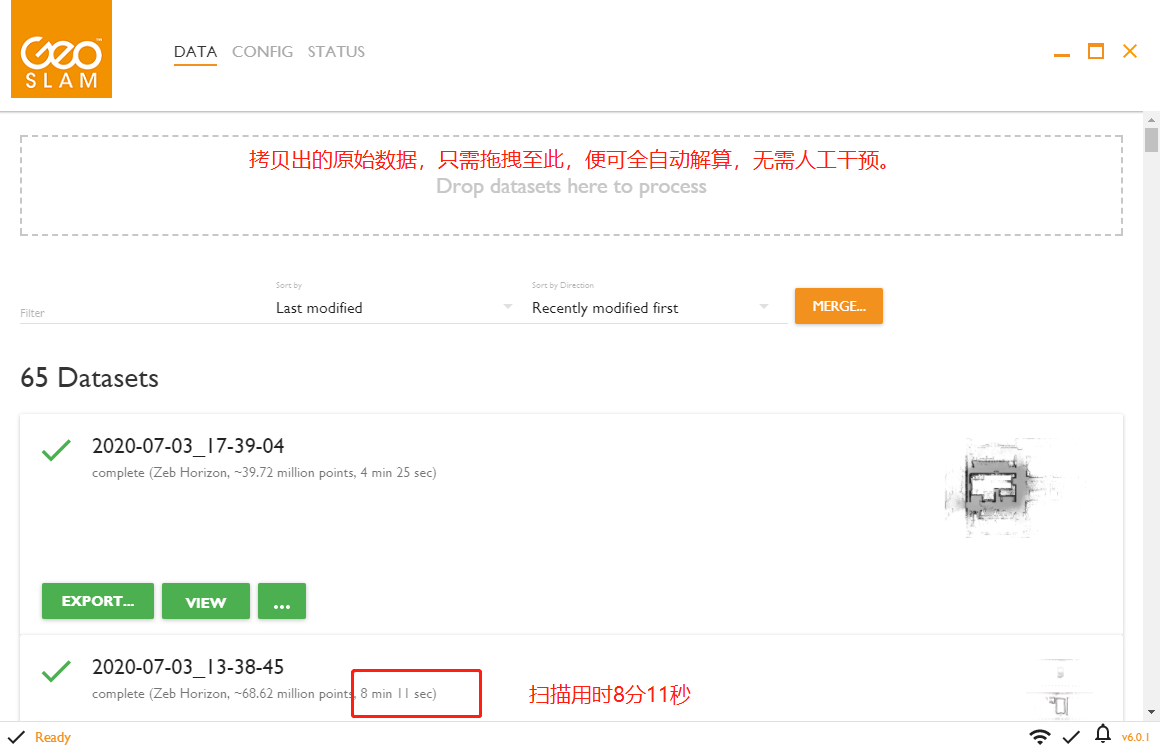
点云解算软件界面
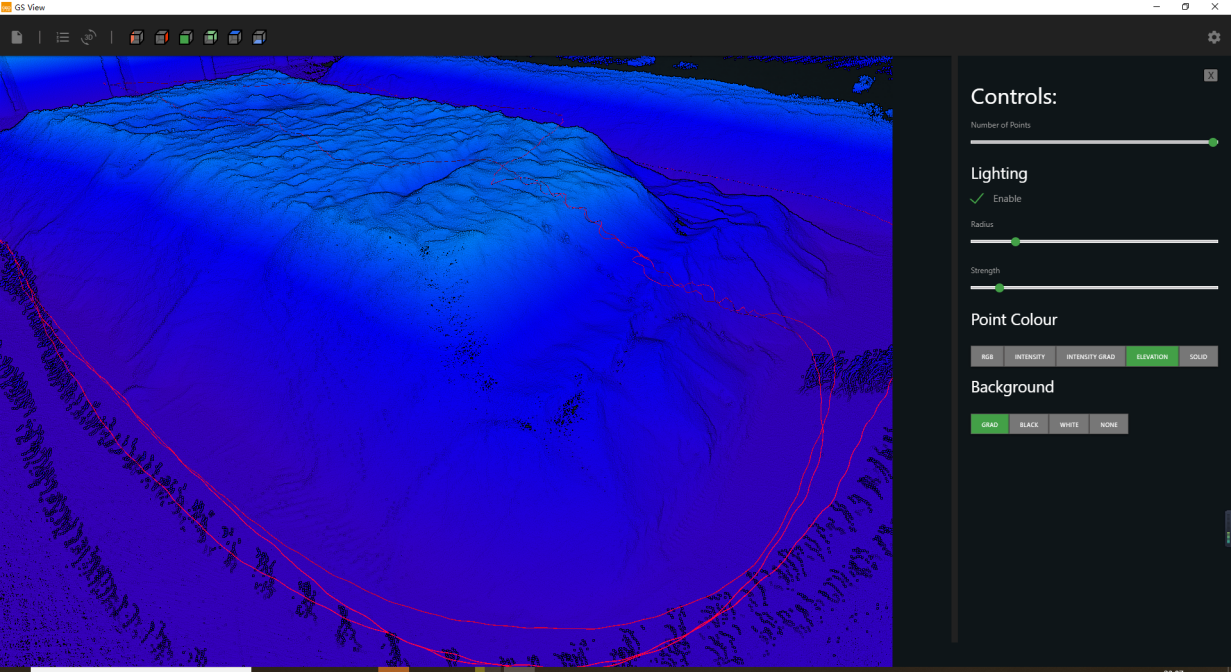
解算完成点云视图预览
点云数据解算完成后,拷贝出工程目录下laz文件。
使用第三方软件(Realworks或者其他类似软件)打开Laz文 件,对堆体点云数据进行一键提取,提取完毕,便基于点云计算堆体方量。
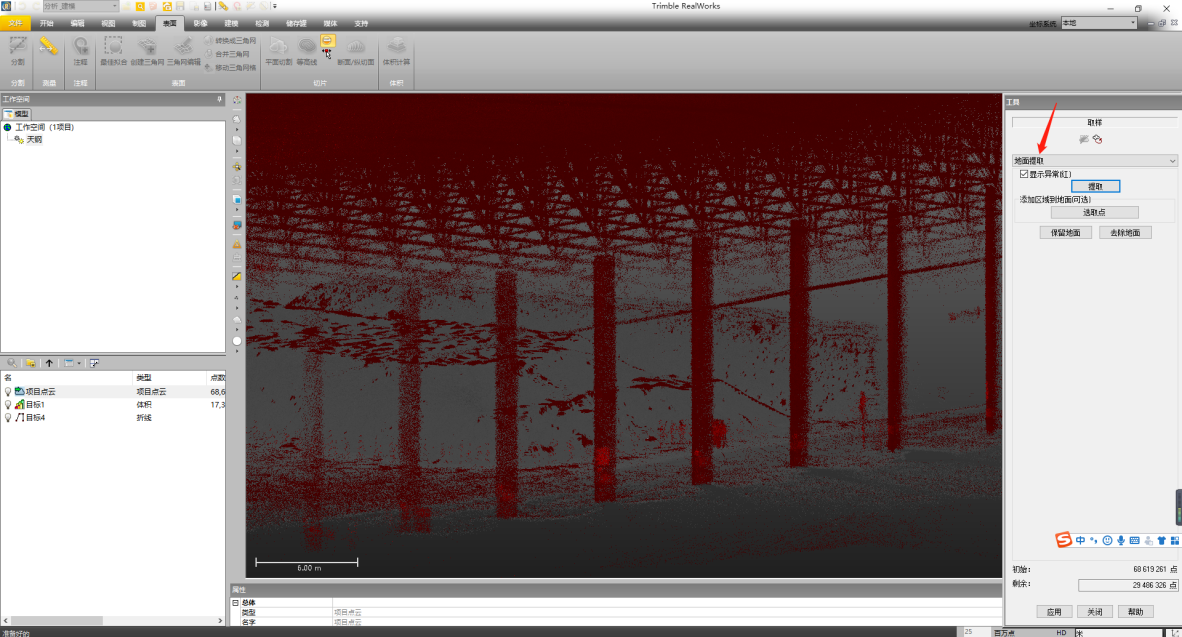
一键提取堆体点云数据界面(红色为被分离的顶棚与水泥柱点云)

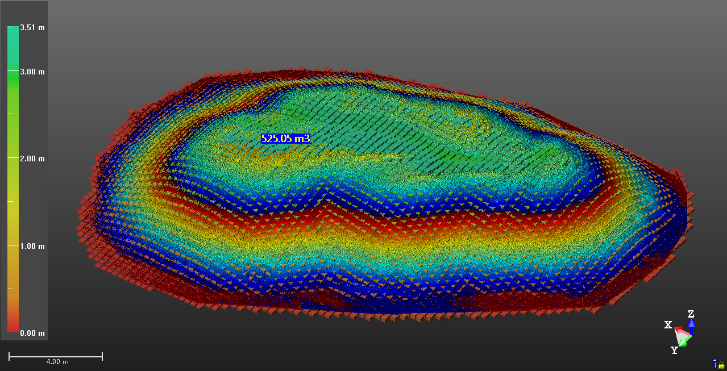
堆体提取后便可设定边界线,一键计算体积及生成报告表
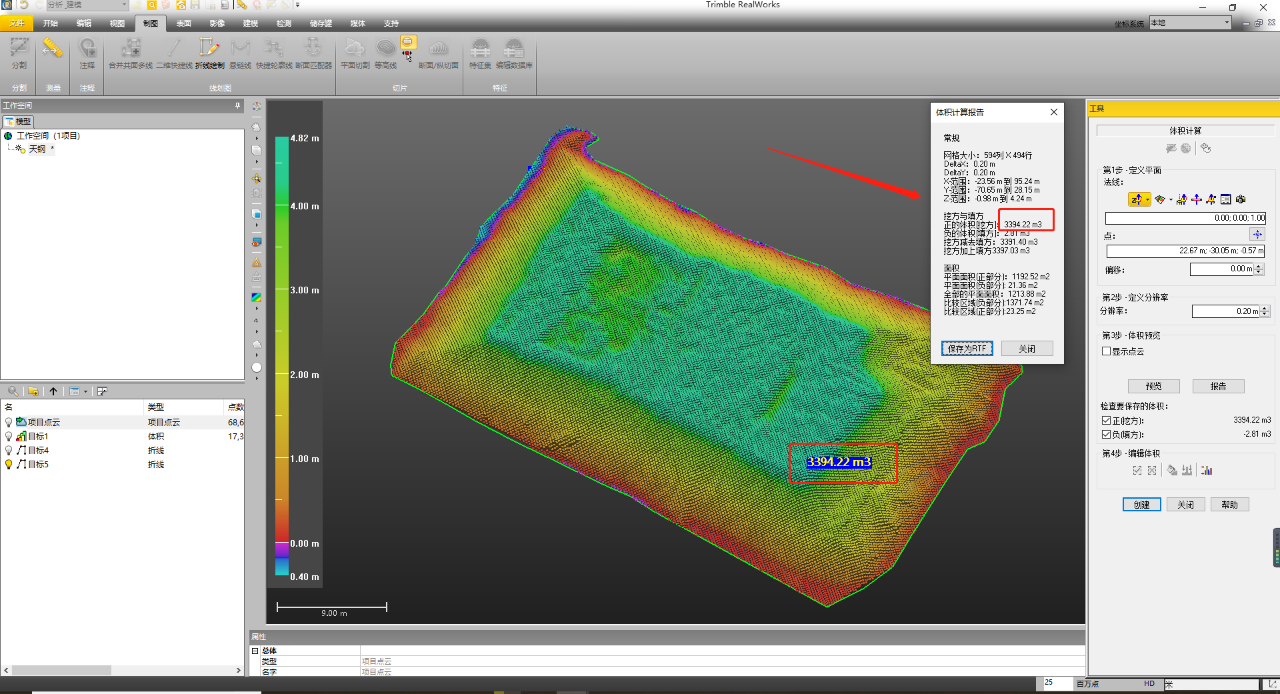
报告表可以word文本格式或PDF格式呈现(此堆体体积为3394.22立方米)
七、总结
随着SLAM移动式三维激光扫描技术的普及,越来越多的人已经感受到它与传统测量仪器之间的天差地别。SLAM移动式三维激光扫描技术利用了可以生成3D立体的点云数据,将堆积物结构的各个方位都能兼顾的到,通过点云数据再进行后期处理、土方量计算。这种作业方式不仅节约了时间,提高了作业效率,也大大减少了人力、物力的投入,更为重要的是,方量计算的精度也很大程度上得到了保证。目前,三维激光扫描仪很多种选择,而针对这种范围广、密集度较高的土方量测算,手持式扫描仪作业方式灵活,仅用一人就可以完成外业扫描工作,作业时间可控,前期也可以进行扫描作业的整体规划。这样,使用GeoSLAM horizon来完成土方量测算便具备了充分的可行性。
八、GeoSLAM Horizon室内外土方量测算解决方案整体配置
