1.前言
随着我国经济水平的不断发展,人民生活水平也逐渐提高。目前,我国京津冀农村大部分地区已经完成了煤改气的基础设施建设。考虑到村街地下管道系统比较复杂,为了避免土方开挖,减少对村街道路和地下管道的破坏,在防火等级允许的情况下,天然气管道多采用室外架空燃气管道的施工工艺,既不影响居民的出行和日常生活,又为日后的检修维修工作提供了便利。然而,错综复杂的燃气架空管网对日后的维护检修提出了新的要求,如果没有完整准确的数字化燃气管线信息,将直接影响检修工作的顺利开展,甚至会造成重大事故与损失。所以说,良好的基础设施和完整的现代数字化燃气管线测量资料是加快农村现代化建设,促进经济发展的重要工作和基本保障,农村煤改气架空管网的数字化迫在眉睫。
目前,针对农村煤改气架空管网的数字化方案,大多为使用GPS-RTK技术采集架空管线关键节点(拐点,弯头,三通)的平面坐标,利用行业内相应的GIS软件编辑专业的属性信息(如:管径,管壁厚度,阀门种类,材质等),形成专属点线表,从而实现二维数字化。该方法能够快速获取架空管网关键节点的平面坐标,可为架空管网的维修提供位置信息。然而,该方法的缺点也十分明显:
1.节点位置精度取决于RTK信号的强弱,在某些卫星信号弱的区域,RTK难以打出固定解,而浮动解和单点解的误差往往在20公分以上。
2.RTK无法测量架空管网的距地高度,而距地高度又是后期维护检修的关键信息,不可忽略。
3.燃气管网建设过程中,不可避免会绕开农房大门、窗户等位置(图1a)形成龙门(上下返),亦或会出现管线分支(图1b),俗称三通,这种沿垂直方向变化方向的节点无法通过平面显示。使用RTK测出的点表中,上返点和下返点的平面坐标一致,无法分辨,而中间垂直方向的管线会被忽略,不利于长度测量。
4.提交的数据成果只有二维点线表,缺少更为精确的三维矢量化结果与更为直观的三维可视化成果。

基于以上RTK测量方法在农村煤改气架空管网测绘中的各种不足之处,为实现快速、详实地为管网施工、维护检修部门提供精确的管网数据信息及信息化平台数据资料,需要准确获得管网的空间位置和相关属性信息,并再次基础上,建立管网的三维可视化平台,实现信息化管理。
区别于传统的点对点测量方式,三维激光扫描技术采用主动、非接触式的获取被测目标表面的三维空间坐标、反射率等信息,形成直观的三维激光点云数据。有效避免了传统作业方式外业劳动强度大、时间长、重复测量、工作效率低等弊端,为快速建立物体的三维模型提供了一种全新的技术手段。
使用三维激光扫描系统采集燃气架空管网的数据可以直观反映管网的真实三维情况,然而,农村煤改气工程所铺设的架空管网遍布整个村落,采用传统的地面架站式三维激光扫描仪采集管线的三维点云数据的效率十分低下,迫切需要可移动的三维激光扫描系统提升机动性,从而提高采集效率。
手持式的SLAM移动扫描系统,采用了突破性的同步定位建图技术,能够在运动过程中获取高精度的激光点云数据,完成农村乡镇大范围燃气管网系统的三维空间构建。得到燃气管网的三维点云数据后,使用针对燃气管网测绘行业开发的PCM软件对架空管线进行所需要素的提取与计算,得到符合实际情况的三维点线表,并将架空管网各节点坐标进行连接,得到三维管道矢量线,在实现三维可视化的同时实现三维矢量化,丰富成果内容,以达到实现燃气架空管网三维数字化管理的目的。
2.Slam技术简介
2.1 SLAM基本原理
SLAM (Simultaneous localization and mapping),意为“实时定位与地图构建”。SLAM可以理解为: 扫描仪在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现扫描仪的自主定位和导航。

图2-1 SLAM技术路线图
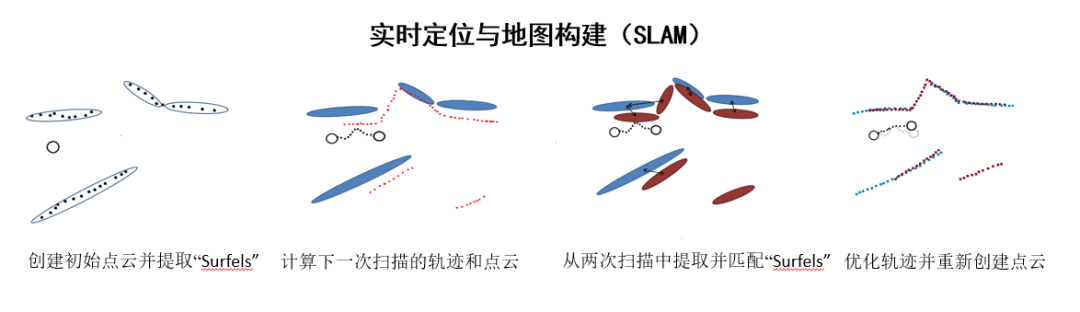
图2-2 SLAM技术原理
2.2 3D SLAM
3D SLAM 技术是激光扫描仪的运动轨迹是一条与工作人员行走的步态有关的非线性和高动态的曲线。按照一般的理解,激光扫描仪如果安装在移动测量系统中,一定要有一个高精度的定位系统(POS 系统)与之匹配。这样,激光扫描仪得到的激光点才能得到对应的位置和姿态数据,进而合成三维的激光点云。为了能解算出激光点云数据的高动态非线性位姿,通过研究激光点云的处理算法,可从这些杂乱无章的点云中找到线索,求取其中隐含的更稳定的高阶特征点和特征向量,并连续跟踪这些特征点和特征向量,进而高精度地动态反向解算扫描仪的位置和姿态。这种高精度的动态反向解算位置和姿态的方法颠覆了传统的测绘方法,为测绘技术开拓了一种新的思路方法。
3.Slam技术特点
目前,现有的地面移动测量系统通常是基于车载的移动测量系统的,但目前地面移动测量系统均需要依赖于全球卫星导航系统(GNSS)和惯性导航系统,只能用于室外环境。然而, 由于室内和地下空间等环境中没有 GNSS 信号,因此,传统的移动测量系统无法正常工作。固定式激光扫描可以用于室内室外的环境,但是复杂场景需要大量换站,然后进行点云拼接, 数据获取的效率十分低下。然而,即时定位与地图构建(SLAM)技术在移动测绘方面具有较好的应用,不依托 GNSS 信号,能够对室内和室外的地面水平环境进行地图构建和环境建模。因此,SLAM 技术在测绘领域中的应用降低了测量复杂性,不需要大量标记地物点,不需要GPS 信号,适用于在室内室外场景,对于解决传统测绘中的定位及场景重建问题具有广阔的前景。
由于 SLAM 技术无需 GNSS 信号,对工作环境又有极强的适应性,基于 SLAM 技术的移动测量系统在多个测绘领域发挥作用,具体表现为:
(1)外业数据采集速度极快,可快速获得所需点云数据,数据精度高。
(2)内业点云预处理时间短,自动化程度高,基本不需要人工干预,短时间便能获得配准好的点云数据。
(3)操作简单方便,无需换站,连续采集,具有连贯性,可实现室内外一体化扫描作业。
(4) SLAM 技术的测绘移动测量扫描仪在任意环境中长时间工作故障率低,对于精度要求较高的重点区域,可与固定测站式三维激光系统配合使用,既能保证精度,又能保证效率。
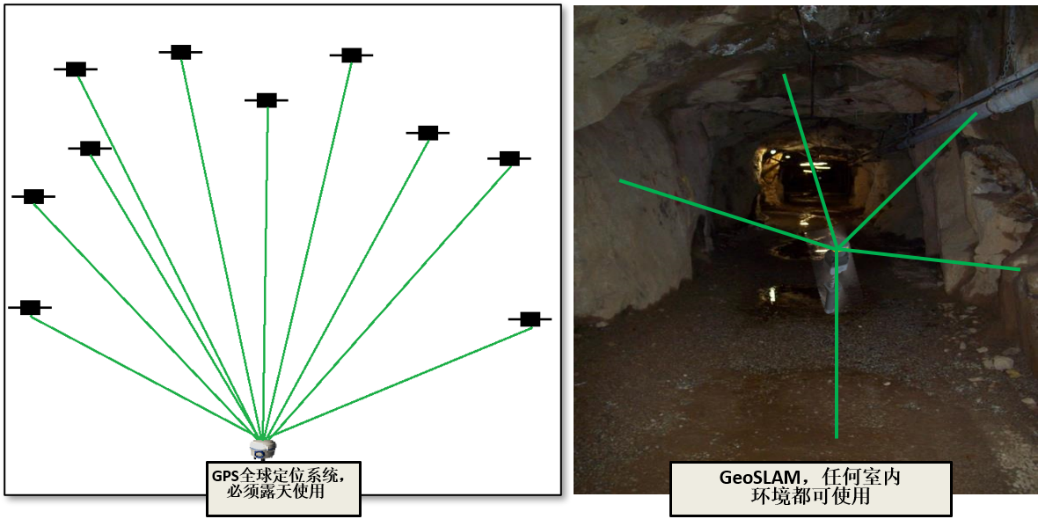
图3-1 无论是室外或者室内扫描环境,只要扫描环境结构特征越明显
SLAM扫描结果越准确
4.GeoSLAM 移动测量扫描系统
4.1 GeoSLAM ZEB Horizon手持扫描仪
GeoSLAM ZEB Horizon手持式移动三维激光扫描仪是由澳大利亚国家科学研究机构 CSRO 和英国三维激光雷达采矿行业解决方案提供者 3D Laser mapping 公司以合资企业的形式成立,并联合研发出的目前最轻便的SLAM 扫描系统。

图4-1 GeoSLAM ZEB Horizon 3D 系统

图4-2 便携式背包与主配件
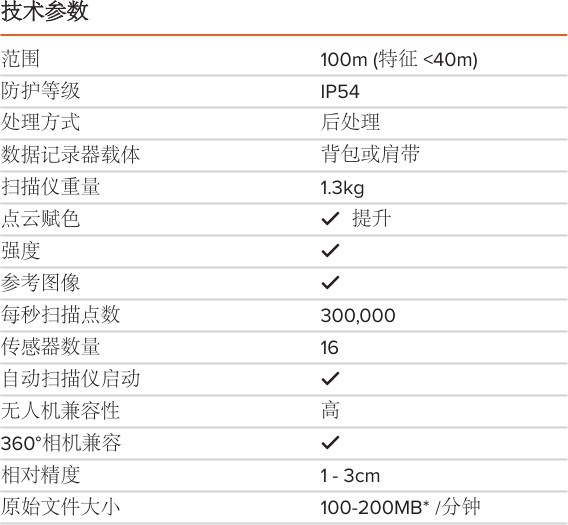
图4-3 GeoSLAM ZEB Horizon系统技术参数
•全套设备仅 2.7kg,可移动的快速扫描多区域环境
•扫描头自动旋转,使动态扫描更加便捷,可进行 360°全景扫描
•结构设计小巧,可进入低矮及狭小空间进行全方位数据采集
•支持手持、固定杆、背负、车载、船载、无人机载等多种方式扫描
4.2 数据预处理软件 GeoSLAM HUB:
•在‘GeoSLAM Draw’中将 3D 数据转换为 2D 矢量数据
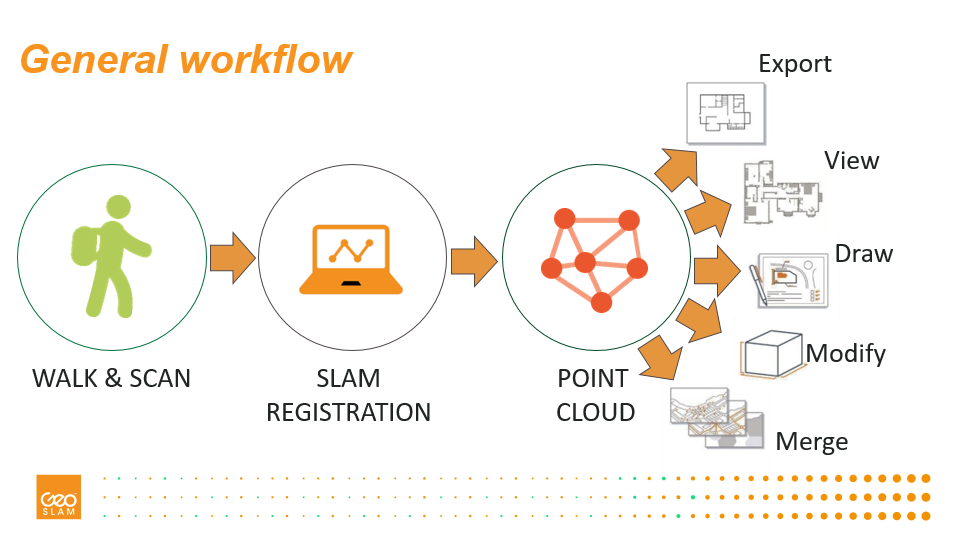
图4-4 GeoSLAM HUB 软件处理数据流程
5. 农村煤改气架空管网测绘实施方案
基于SLAM技术可以对视觉信息和激光雷达数据进行三维重建与地图构建。它在测绘领域有着广泛的应用,尤其是能够更加精确地重建三维模型数据,这对于精确测量,高精度导航,特别是室内测绘中等方面的应用有着重要的意义。
5.1 实施流程
采用GeoSLAM ZEB-HORIZON 设备对燃气管网进行三维点云数据采集,使用后处理软件PCM对实测三维管网点云节点进行提取与属性编辑,内容包括节点的三维坐标XYZ、节点点号、埋深、种类、压力级别、材质等,得到能够上传燃气管线GIS系统的点线表。将节点按顺序依次连接成三维矢量线可导出三维矢量成果。
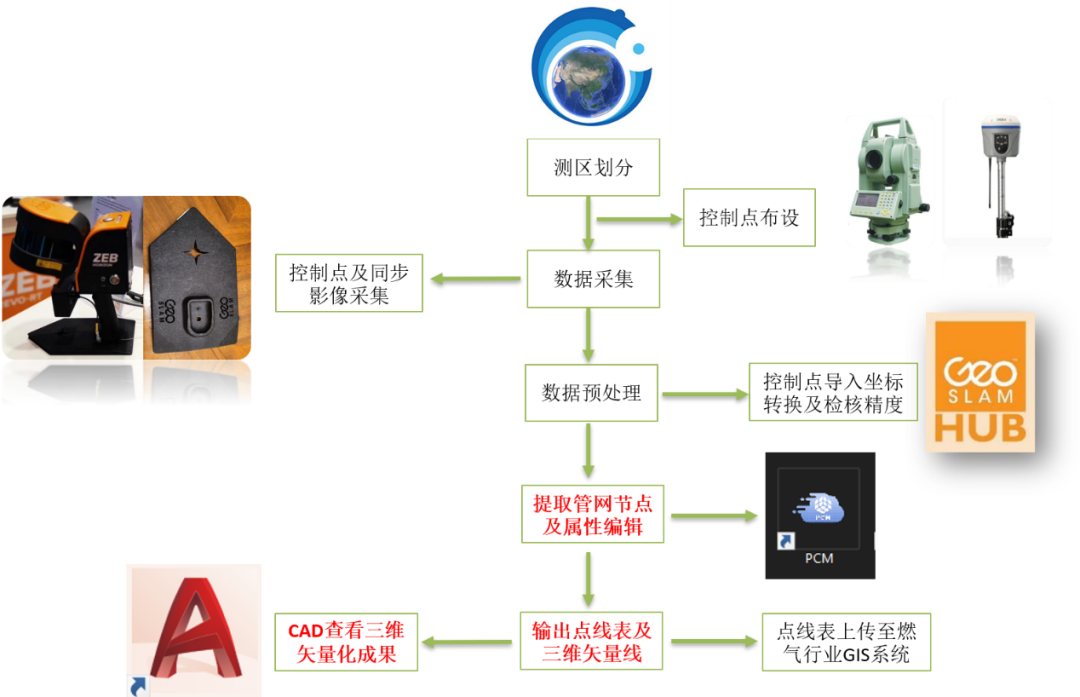
图5-1 Geoslam架空管网测绘工作流程图
5.2外业数据采集
GeoSLAM ZEB-HORIZON设备外业操作简单,一键开机30秒完成初始化,之后拿起扫描头,背上放有电池和数据记录器的背包后就可以在走动中完成扫描,其扫描测程100米,点云相对精度优于±3cm,飞萤相机实时记录扫描过程中所拍摄到的影像信息,通过后处理可以使点云带有彩色纹理信息或者作为辅助识别管线。外业数据采集流程如下:
1.采用两人小组制,1人使用GeoSLAM进行主要扫描,另外1人测量控制点坐标,控制点坐标经RTK 3次测量后求平均值。两人需要紧密配合,控制点测量人员需要动作迅速,提前布设好控制点位并测量完坐标值,通常每个管网系统平均分布3-5个左右控制点。
2.现场人员需熟悉每村各管网系统调压箱位置,主测人员持Geoslam Horizon扫描仪沿编号的管网系统调压箱开始扫描,直到系统末端结束,单次扫描时间控制在15分钟之内,这样即使在扫描路径不闭合的情况下,依旧能保证数据绝对精度在5cm以内。同时,按管线系统扫描易于数据编号与整理,大大降低内业人员工作量。
3.扫描完毕后,使用U盘从处理器中拷贝原始数据,上传至内业人员解算处理。
根据现场情况及实际作业需要,RTK打点人员可骑电动车搭载主测人员进行扫描。经测试,电动车行进速度小于15km/H时,点云密度不会有明显下降,架空管线依旧清晰。同时得益于Geoslam ZEB Horizon内置强大的高精度IMU(惯导系统),车辆于不平整路面行进而产生的颠簸不会对数据质量造成影响。这种方式极大地提升了外业扫描效率,两人一天外业工作8小时,能够保证采集不低于15KM的管网系统点云数据。
5.3数据内业处理
5.3.1 原始数据解算
将原始数据导入进预处理软件 Hub 里进行解算。GeoSLAM HUB软件支持数据批量解算,批量解算的数据数量及解算速度与电脑配置及扫描时长有关。单个数据解算时间为扫描时间的1.5-2倍。经测试,配合高性能笔记本或工作站,每天外业扫描的数据当天晚上即可解算完毕。
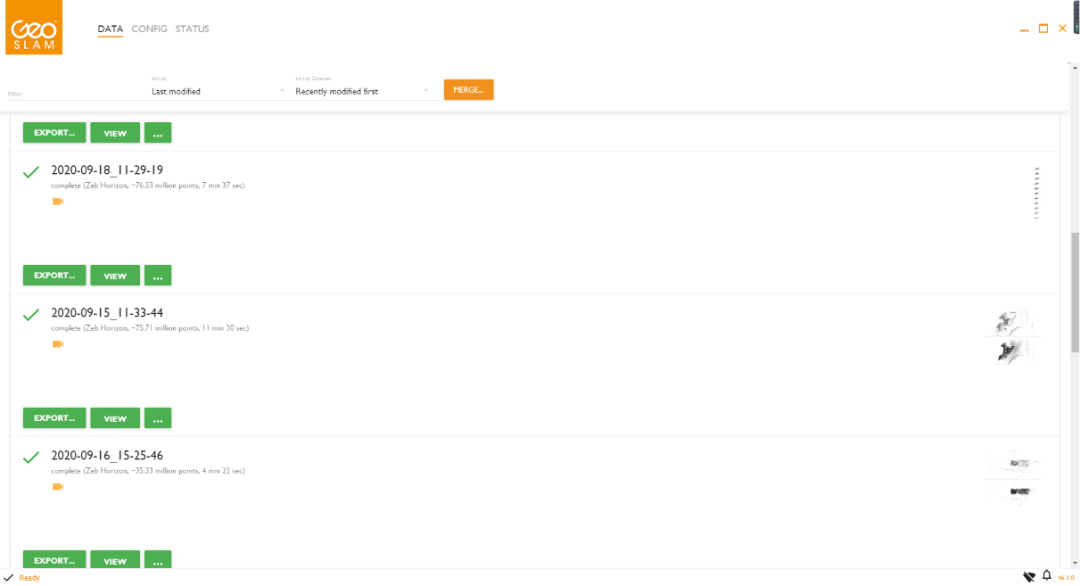
图5-3 GeoSLAM HUB软件界面
在预处理软件 Hub 中查看点云数据的整体 3D 效果,也可以以 2D 效果图来进行显示。当同步影像与点云相匹配之后,点云数据还能够以 RGB 真彩色来显示,与最终成果图对比起来会显得更加的直观有效。

图5-5 架空管网点云
5.3.2 绝对坐标转换
数据解算完毕后,将控制点坐标导入GeoSLAM HUB软件中,完成坐标转换,转换结束后,HUB软件会生成精度报告,对比控制点的坐标值与实际值,给出均方根误差RMS。
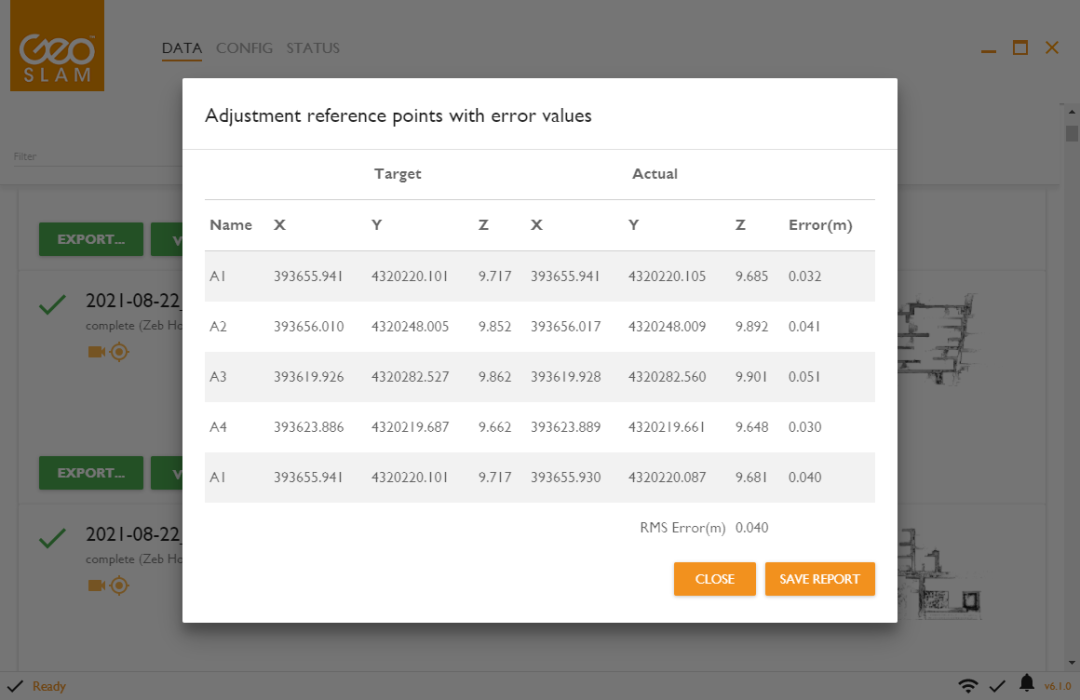
图5-6 坐标转换均方根误差结果
以上,点云原始数据的预处理已进行完毕,可以直接进行三维矢量化与管道节点属性编辑工作。
5.3.3 架空管网三维矢量化
使用后处理软件对架空管网点云进行三维矢量化,生成可以导入CAD的矢量化成果。
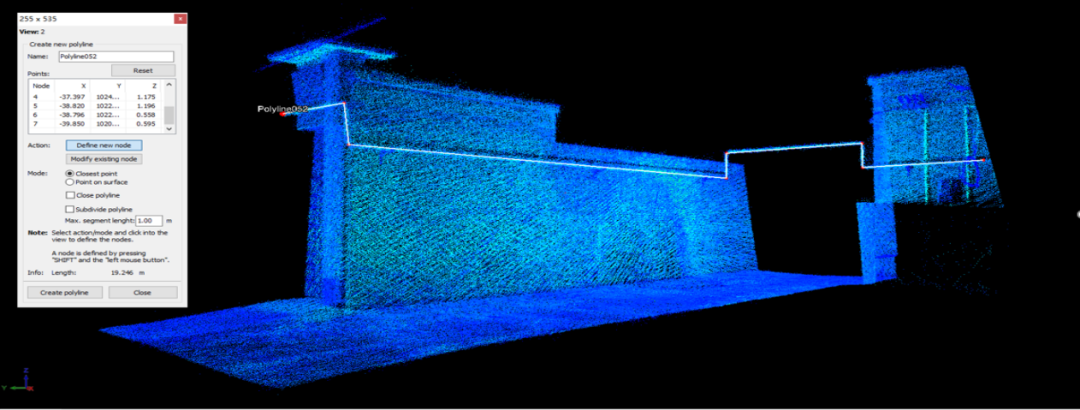
图5-7 架空管网矢量化提取
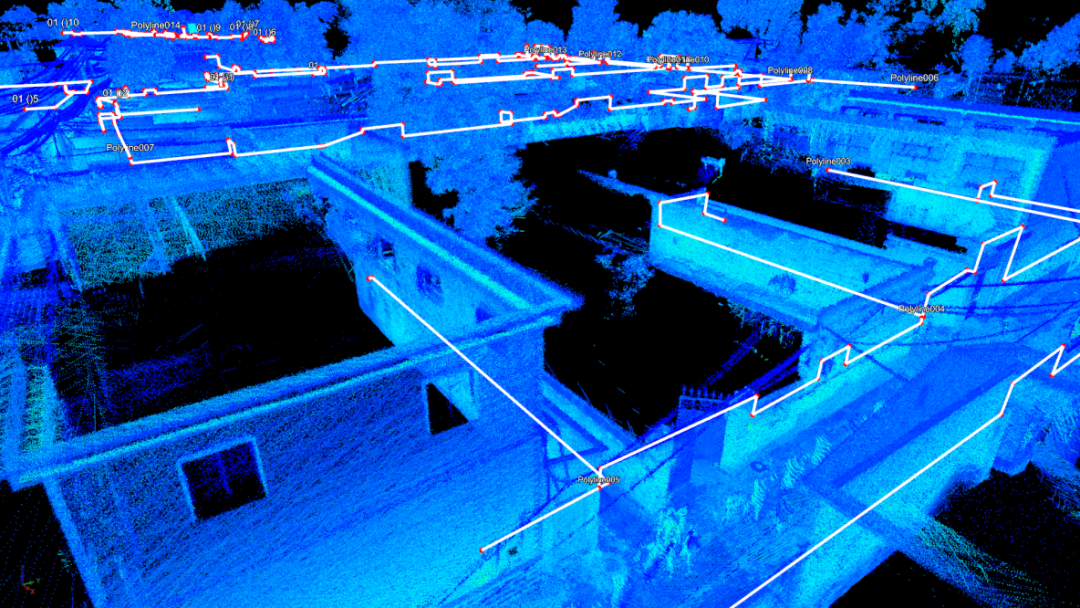
图5-8 架空管网矢量化提取成果
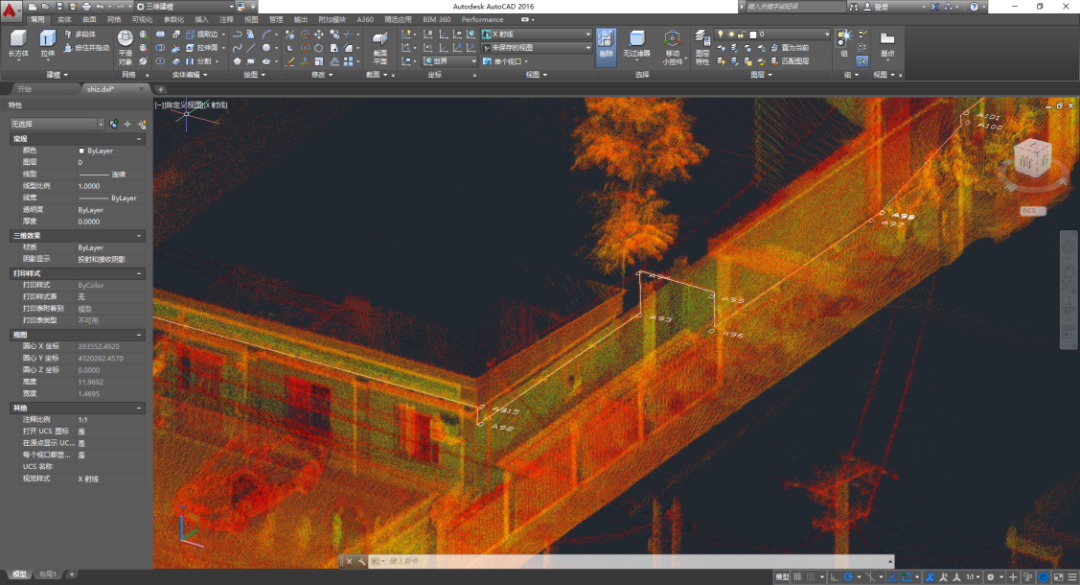
图5-9 架空管网矢量化结果导入CAD
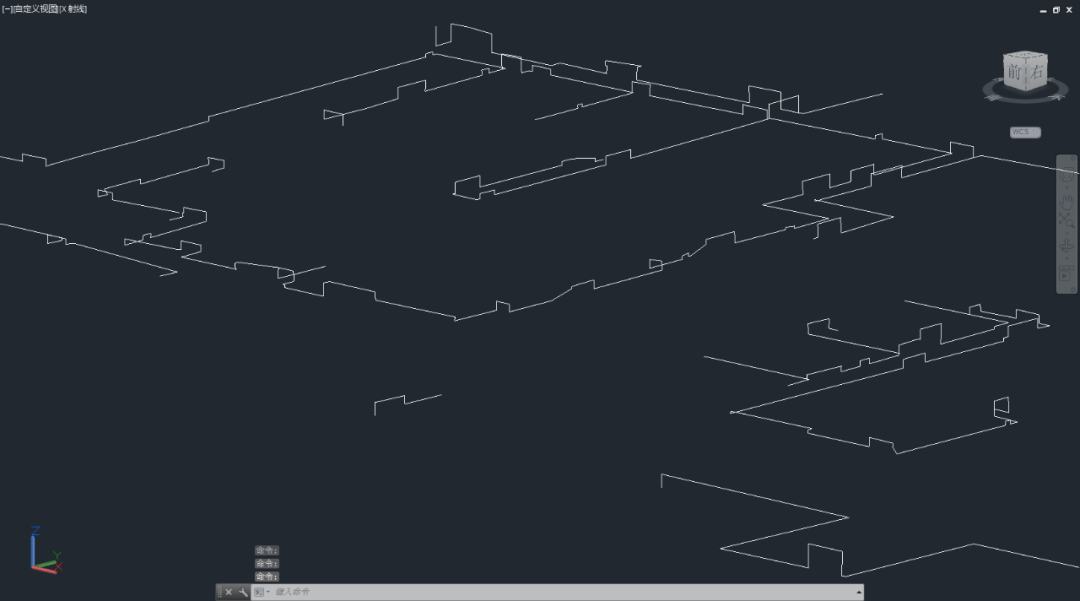
图5-10 架空管网单线图
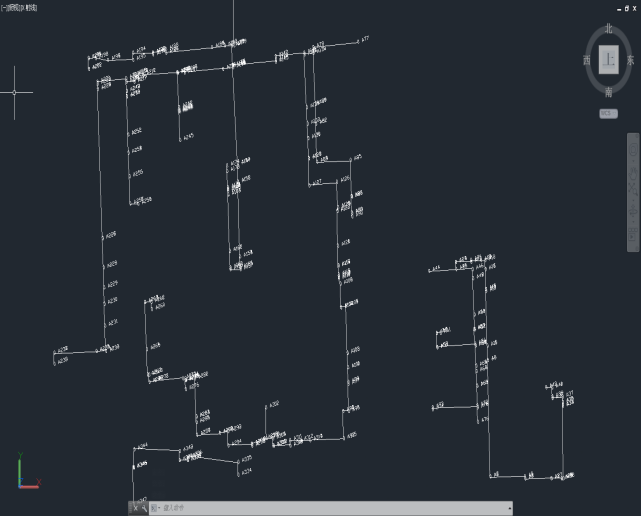
图5-11 架空管网成果图
5.3.4 架空管网节点编辑
PCM软件是针对燃气架空管网测绘工作所专门开发的一款点云软件,具有易上手,逻辑简单,易于操作等优势。相当于把传统外业RTK打点的工作搬到室内电脑上,在点云中精确选择节点,大大提升成果的准确度与可靠性。其优势如下:
1.针对燃气行业专门开发,操作简单,易上手,降低学习成本。
2.直接在三维点云上选择燃气管道拐点、节点、三通点等。相当于在点云上使用RTK打点,保证每一个节点的精度。尤其针对某些村庄RTK信号弱导致无法打出固定点的问题,提供了有效的解决方法。
3.选择的点自动计算大地坐标(XYZ),并可编辑种类、压力级别、管径等重要要素。
4.可以批量导出与GIS平台相通的点表与线表,与燃气行业内部GIS平台完美衔接。
5.节点可按顺序自动矢量化(连接成矢量线),并支持导出DXF文件,可按项目需求提交三维矢量结果。
6.实现自动计算管线离地面高度。解决RTK外业无法精准测量架空管线的高度问题,为后期管线维护等工作提供可靠的数据信息。
7.成果以点云、矢量文件、点线表等形式存档,易于调取、查看、修改。
图5-12 PCM软件主界面
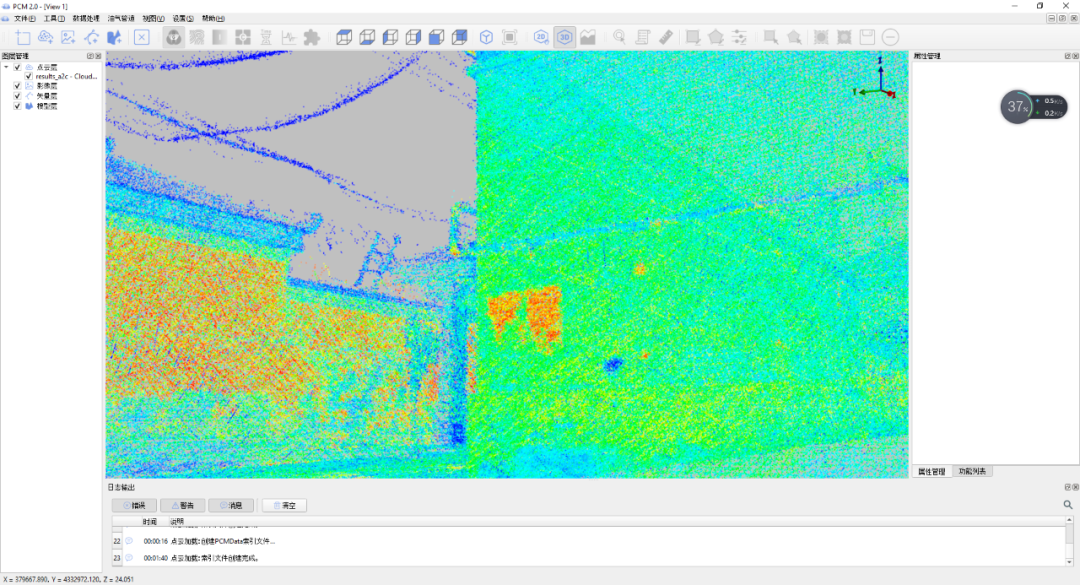
图5-13 PCM软件导入点云
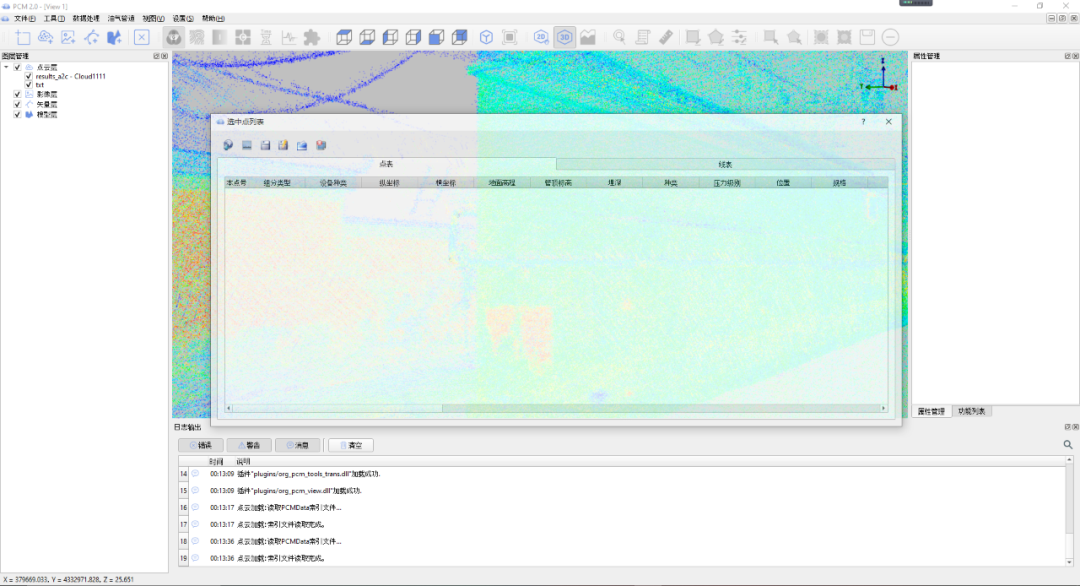
图5-14 架空管网节点编辑界面
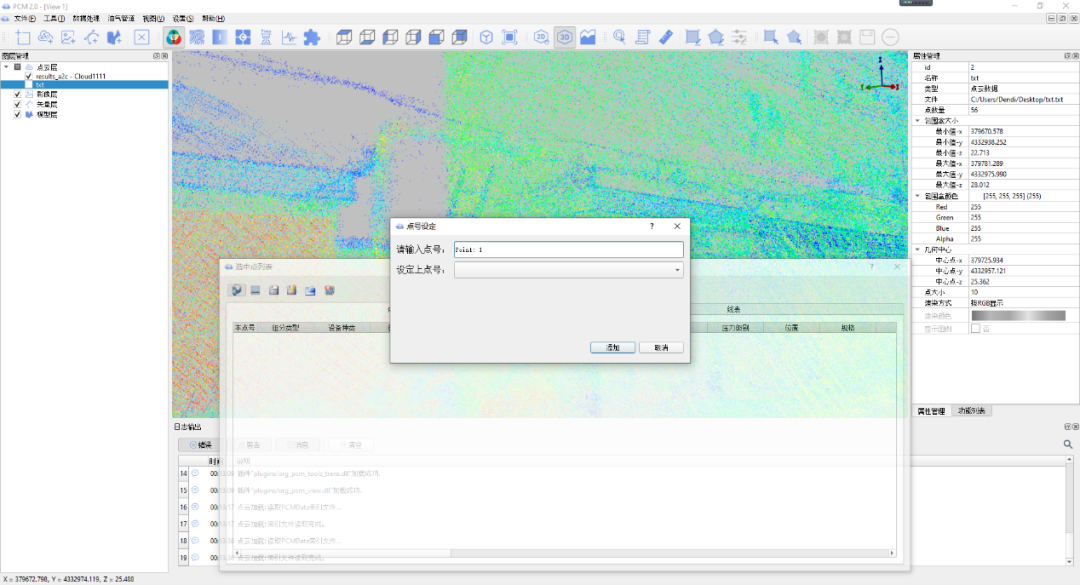
图5-15 架空管网节点编号输入

图5-16 两节点连接成线
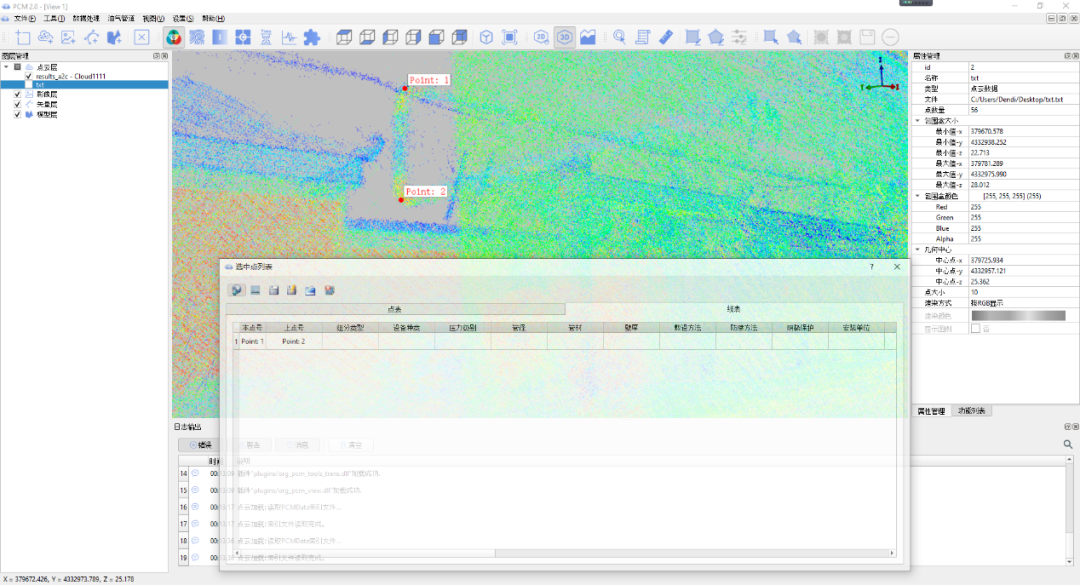
图5-17 线表显示节点连接顺序与逻辑
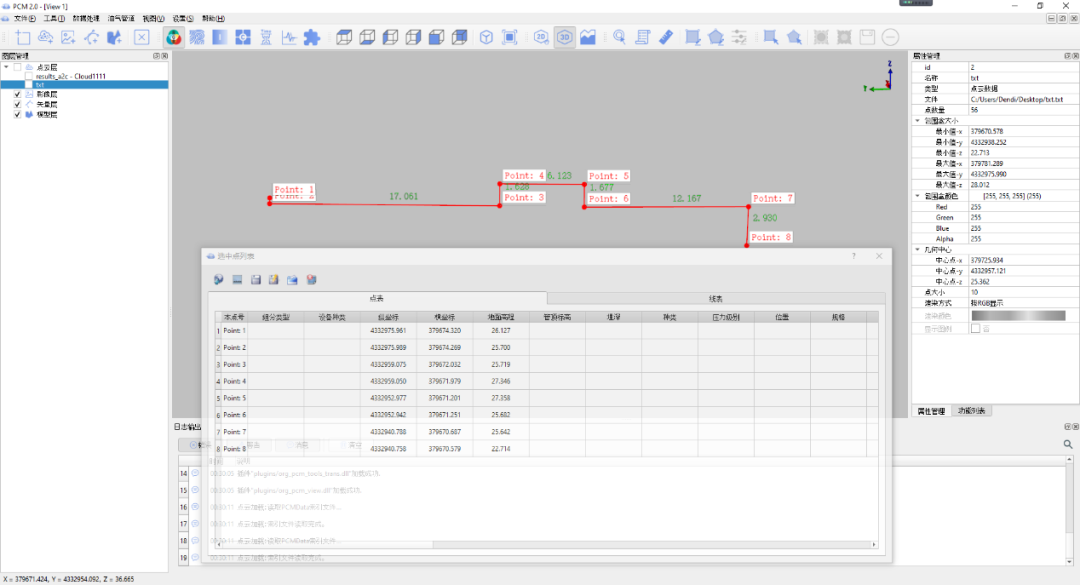
图5-18 管网系统局部点线表及矢量化成果,管线长度自动计算
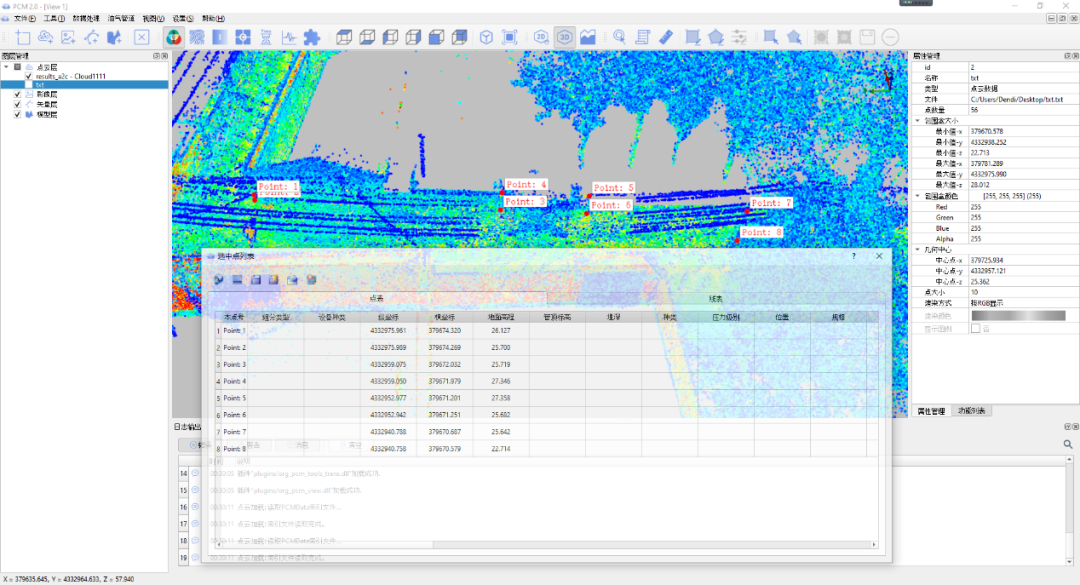
图5-19 管网系统点线表编辑与输出
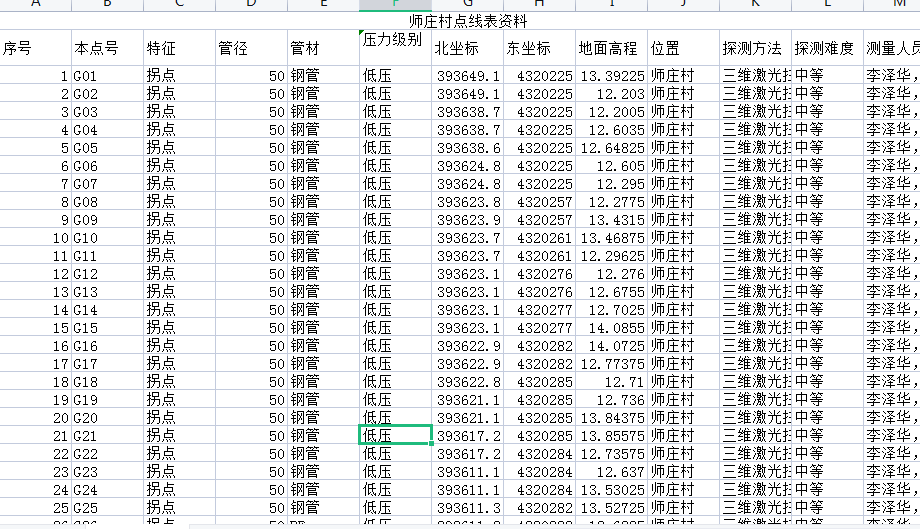
图5-20 PCM软件生成的点线表,可直接上传GIS系统
经实际作业,使用PCM软件制作管网系统点线表与三维矢量成果,单人工作8小时可完成7-8KM的管网系统工作,结合外业数据采集效率,给出如下人员与设备分配方案:
外业2人一天完成15公里管网测量,当晚完成数据解算与坐标转换,数据上传网盘。
内业2人一天完成15公里管线系统点线表与三维矢量成果绘制,提交GIS系统。
设备: GeoSLAM ZEB Horizon移动测量系统一台、RTK一套、电动车一台、高性能笔记本电脑一台(用于解算数据)、内业台式机(笔记本)两台,用于管网节点信息采集与三维矢量化。
